Der Erste Schritt zur Inbetriebnahme einer Leiterplatte ist die Validierung der Stromversorgung.
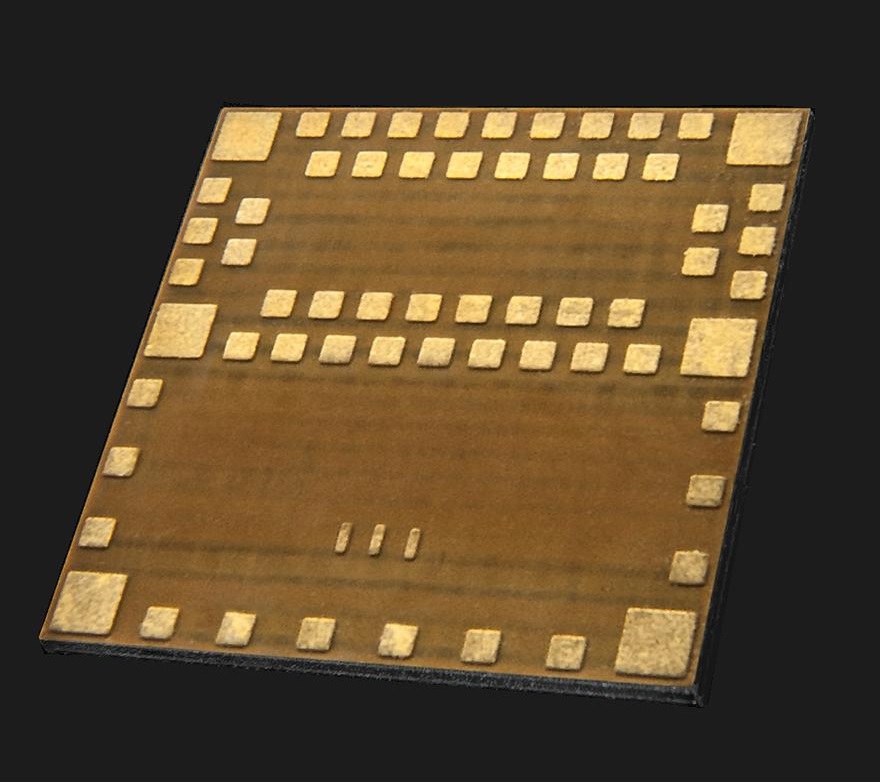
Die Leiterplatten sind geliefert worden und ich habe eine teilweise bestückt. Ich habe zuerst den 3,3V Boost Regler installiert. Mit einem Oszilloskop habe ich die Spannung am Ausgang des Reglers bewertet. Mit einer Last, die dem Regler 15mA konstant abverlangte, kam ich auf einen Ripple von 20mV auf der Ausgangsspannung. Dieser Ripple änderte sich nicht, egal ob die Ausgangsspannung mit nur 1mA oder mit 100mA belastet wurde. Daher habe ich als nächstes das Funkmodul bestückt. Mit dem bestückten Funkmodul war ich dann in der Lage eine Verbindung mit dem Debugger herzustellen. Als Debugger verwende ich einen JLink Pro von der Firma Segger. Nordic Semiconducters hat für diese Serie an Debuggern einen hervorragend Support.
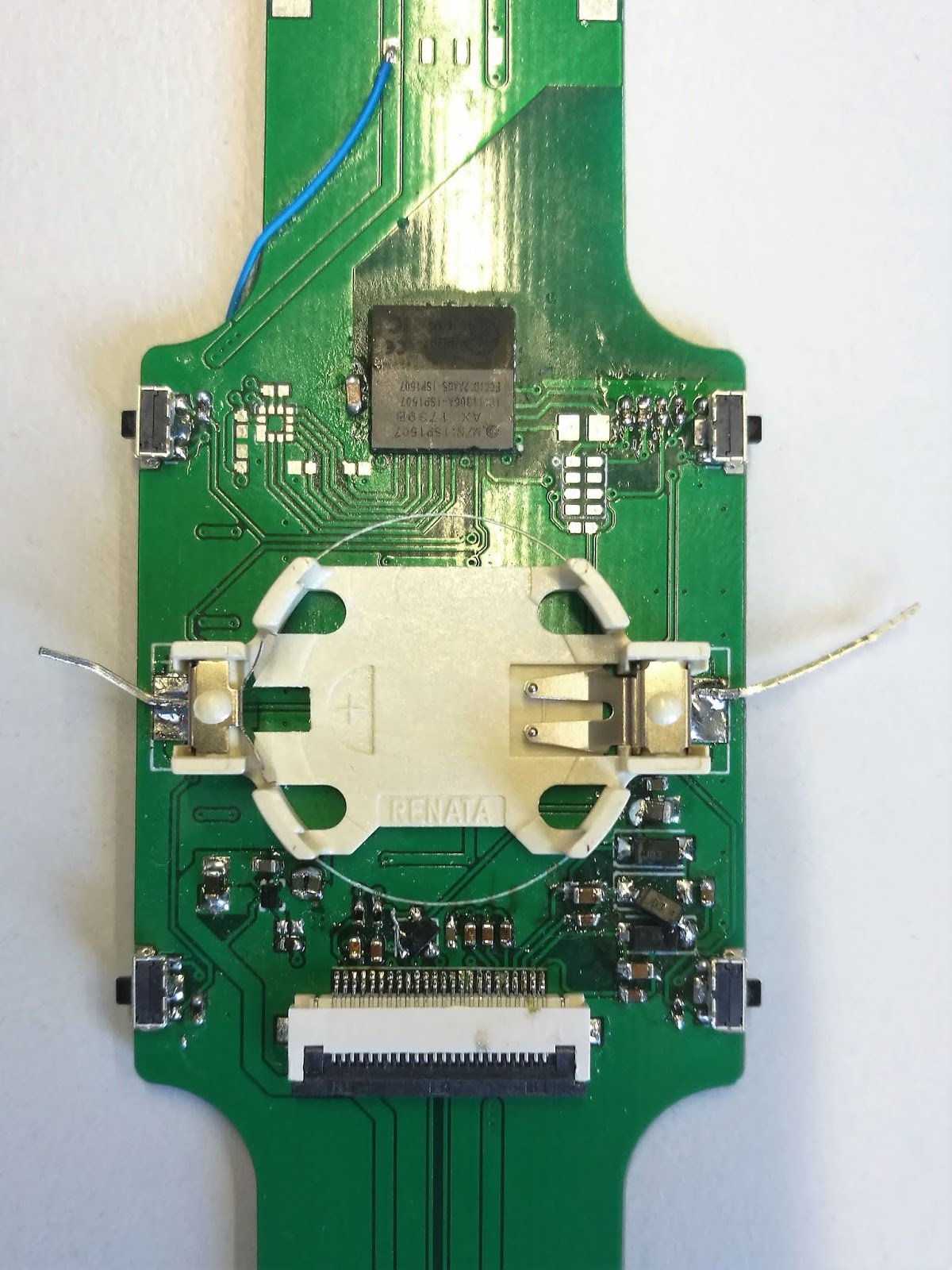 Nachdem auch der Debugger mit dem Funkmodul in Betrieb genommen war, habe ich die restlichen Bauteile für die Ansteuerung des Displays aufgelötet. Das Display hat im Controller einige Reglerfunktionen integriert und kann sich eigene Hilfsspannungen erzeugen, dazu braucht es lediglich ein paar Kondesatoren, einen Transistor und einige SPI Befehle. Das Footprint des Transostors im Layout der Leiterplatte ist fehlerhaft, die Pins Gate und Drain sind vertauscht. Ein einfaches drehen des Transistors hat das aber wieder repariert.
Nachdem auch der Debugger mit dem Funkmodul in Betrieb genommen war, habe ich die restlichen Bauteile für die Ansteuerung des Displays aufgelötet. Das Display hat im Controller einige Reglerfunktionen integriert und kann sich eigene Hilfsspannungen erzeugen, dazu braucht es lediglich ein paar Kondesatoren, einen Transistor und einige SPI Befehle. Das Footprint des Transostors im Layout der Leiterplatte ist fehlerhaft, die Pins Gate und Drain sind vertauscht. Ein einfaches drehen des Transistors hat das aber wieder repariert.
Ohne angeschlossenes und konfiguriertes Display ist also die Schaltung nicht funktionsfähig. Trotzdem kann sie mit einem einfachen Toggle Signal an allen betroffenen IO-Pins auf Funktionalität und Kurzschlüsse getestet werden.
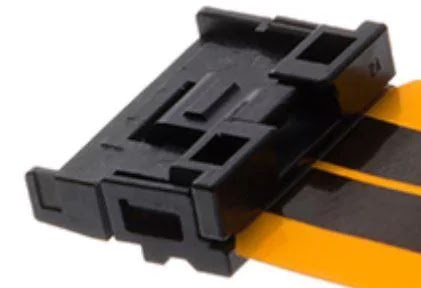
Kurzschlüsse auf Pins des Displays zeichnen sich hauptsächlich durch die Verlust der Signalqualität am Display Stecker aus. Wenn also ein Output Pin des Funkmoduls, der ein High Signal liefern soll, versucht gegen ein kurzgeschlossenes Low-Signal zu treiben, wird sich die Spannung ungefähr in der Hälfte des erwarteten Wertes befinden.
Nach Beseitigung der Kurzschlüsse am Displaysteckverbinder kann die Inbetriebnahme des Displays beginnen. Dazu habe ich eine Testsoftware geschrieben, die das Display startet und Werte anzeigen soll. Mit Hilfe der verfügbaren Ressourcen auf dem Funkmodul wird ein Bild erstellt, dass dem Display Pixel für Pixel übergeben wird. Danach wird gefragt, ob das Display bereit ist und wenn das der Fall ist, wird das nächste Bild übertragen.
Aktuell startet das Display die Hilfsspannungen nicht von alleine und es zeigt nichts an. Dieser Zustand benötigt viel (relativ zum normalen Betrieb) Strom, sodass das Display spürbar wärmer wird.
Wie genau sich die Ansteuerung in dieser Schaltung zu der Ansteuerung auf dem Eval-Board unterscheidet, wird sich zeigen, wenn das Evalboard den langen weg aus China zu mir gefunden hat.
Bis dahin stehen noch weitere Peripherien zur Verfügung die gerne in Betrieb genommen werden möchten. Darunter fallen:
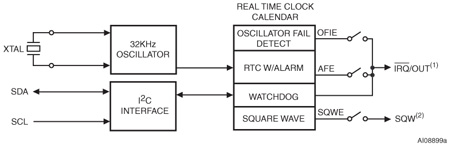
- I2C Bus für Echtzeituhr
- I2C Bus für Bewegungssensor
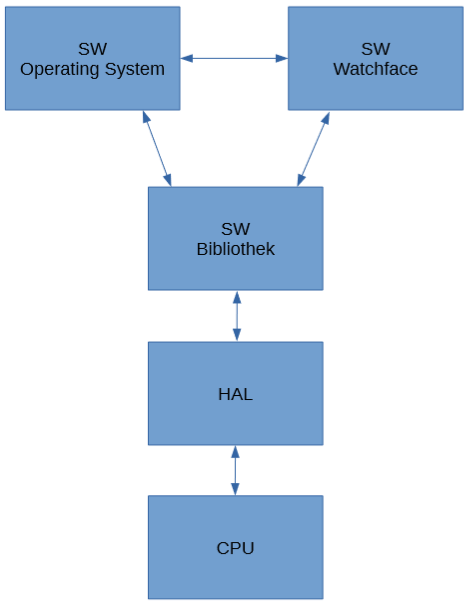
- Applikationsstruktur der Firmware (nachladbare Code Teile)
- BLE Softdevice