
Feedback zur letzten Folge
Wir hatten ca. 500 Downloads. Vielen Dank fürs Anhören.
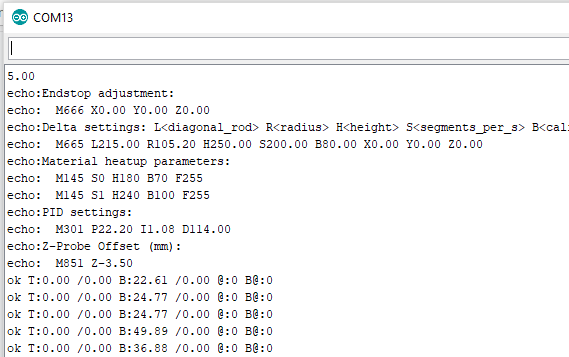
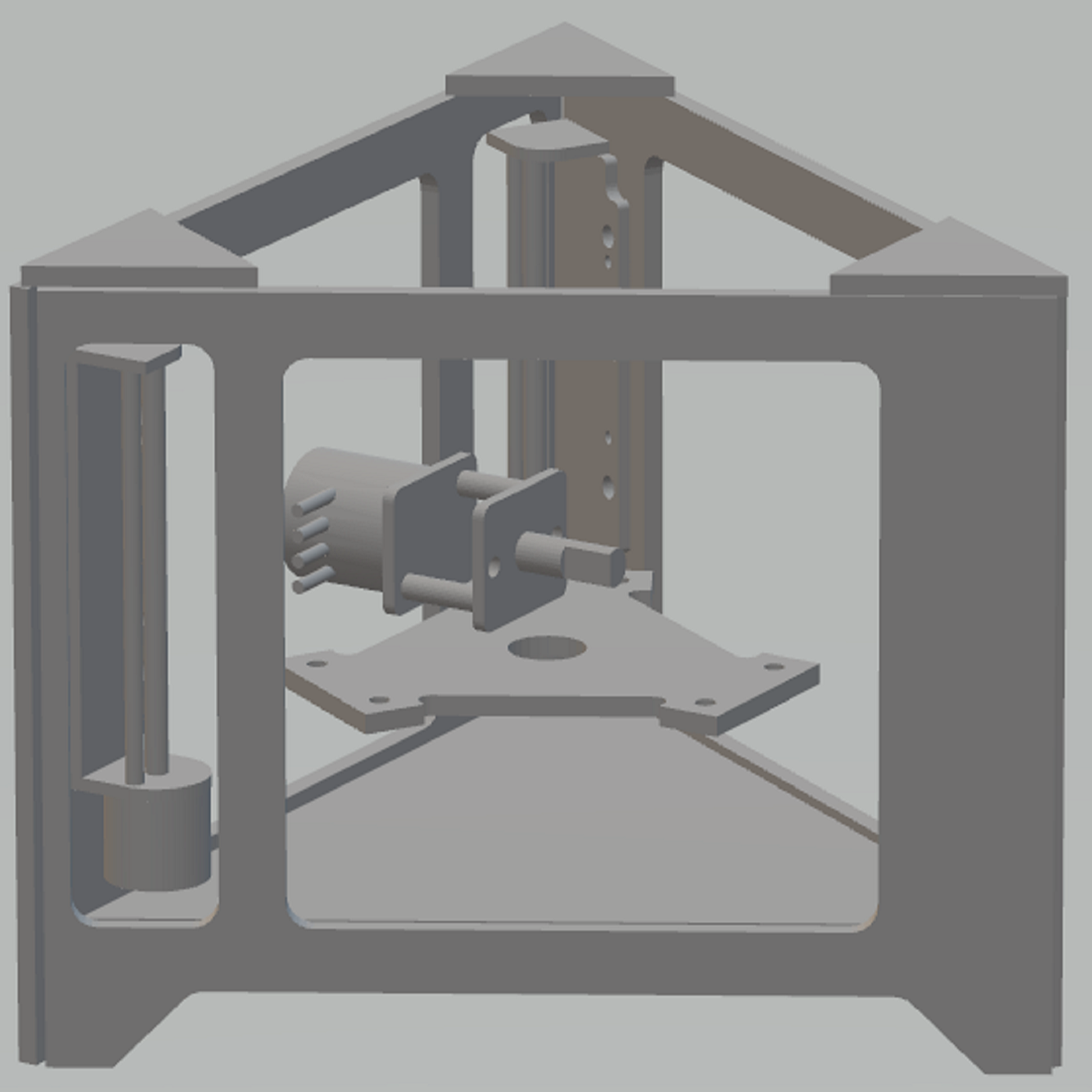
Julian hat nach weiteren Informationen insbesondere zum Druckkopf des Mini Druckers gefragt. Chris erzählt wie er vor hat das Hotend zu gestalten und zu erhitzen.
Raphael sieht noch Verbesserungspotential was die Detailtiefe betrifft. Wir versuchen daran zu arbeiten.
Neujahrsputz
Wie jedes Jahr haben wir wieder aussortiert. Diese mal rigoros. Es sind insgesamt 3m³ geworden.
Projekt Knöpfchenspiel
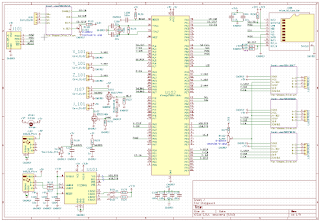
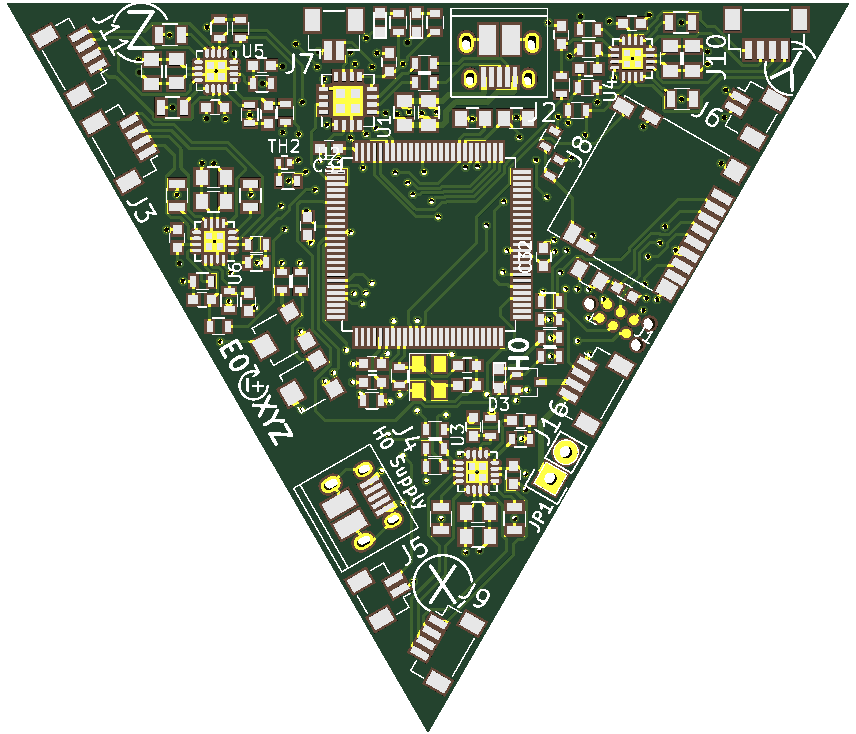
Wie bereits im Blog beschrieben, handelt es sich beim Knöpfchenspiel um ein Arcade-Hallen Spiel. Das ganze wird allerdings etwas anders aufgezogen. So haben die Spielen nicht nur 9 Knöpfe, wie im Video, sondern 16 in einem 4×4 Raster. Basti beschreibt weiter die einzelnen Module, die das Spiel ausmachen. Es sind zur Zeit nur der differenzielle I2C Treiber auf dem Raspberry Pi fertig. Darüber wird es demnächst auch mehr im Blog zu lesen geben.
Basti erklärt, was ein Raspberry Pi HAT ist und was man dabei beachten muss. Er erzählt auch von der Erfahrung ein Datenblatt für eine selbstgebaute Hardware zu erstellen.
Nach der Fertigstellung des Knöpfchenspiels, kann über weitere Anwendungsgebiete des differenziellen I2C Treibers nachgedacht werden.
Die Kosten für das Projekt belaufen sich auf ca. 222€.
Chip der Woche
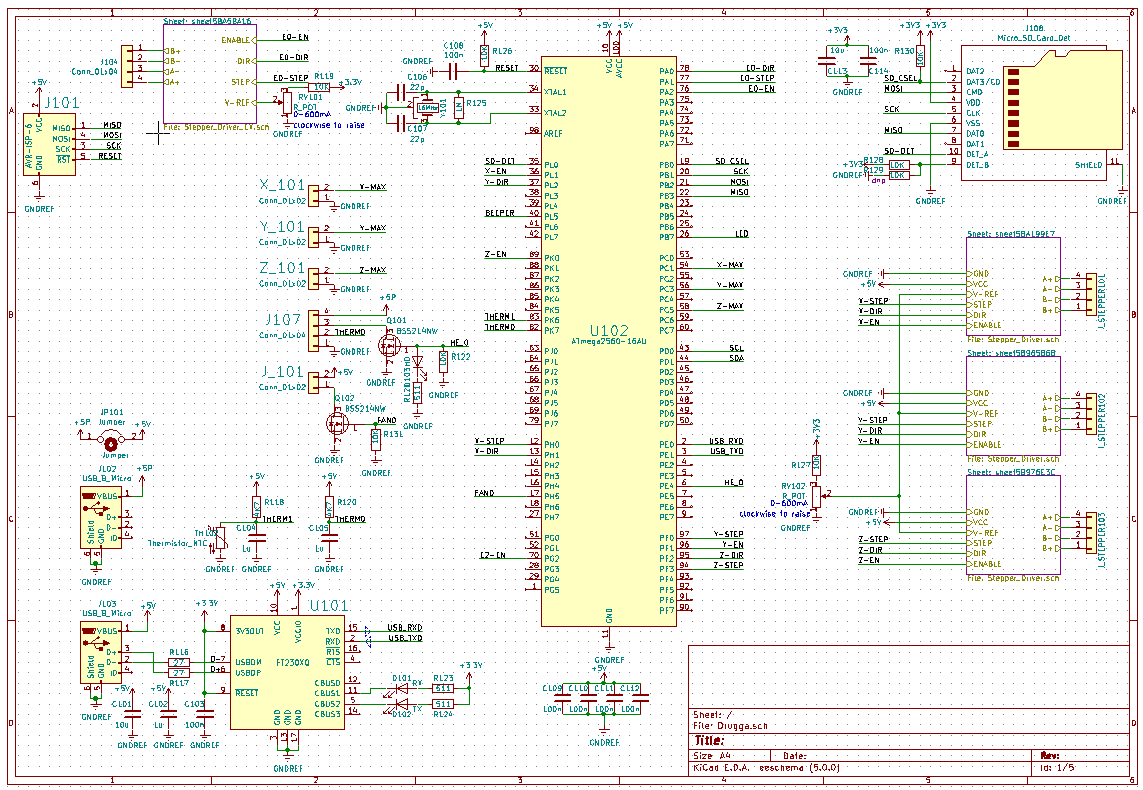
Chris hat sich diese Woche den FT230x von FTDI herausgesucht. Der Chip hat neben der Plug&Play 3Megabaud-UART Schnittstelle noch einen 3,3V Regler, den man mit 22mA belasten kann. Dadurch kann eine komplette Schaltung aus den 5V des USB versorgt werden und benötigt für den Mikrocontroller nicht noch zusätzlich einen DC/DC oder Linear-Regler.
Wir wollen die zwei Episoden pro Monat beibehalten, jedoch keinen alle 14 Tage Zyklus festlegen.


{kind=link}