Warum ich einen MBA gemacht habe und was es mit gebracht hat.
Viele haben mich gefragt: „Warum ein MBA, du bist doch Ingenieur?“ Die Antwort ist einfach: Ich wollte verstehen, wie Unternehmen funktionieren – über Technik hinaus. Ich habe in den vorherigen Post davon geschrieben, dass ich die Sprache verstehen will, die in Unternehmen außerhalb der Entwicklungsabteilungen gesprochen wird. Und da war für mich der logische Startpunkt das Studium der Wirtschaftswissenschaften. Da ich allerdings bereits einen Hochschulabschluss besitzen konnte ich mit einem höheren Abschluss gezielt in die Richtung gehen, die mich interessiert hat. Weg vom allgemeinen BWL hin zu Geschäftsführung. Ich habe nicht vor in diesen Bereich zu wechseln. Das eigentliche Führen des Geschäfts darf gerne jemand anderes machen. Aber ich möchte wissen wie die Ticken und warum Entscheidungen getroffen werden, die aus der Sicht eines Ingenieurs nicht nachvollziehbar sind. Einfach um die richtige Sprache zu sprechen, wenn es darum geht die richtige Entscheidung zu treffen.
Als Teamleiter habe ich bereits im ersten Jahr gemerkt, dass Entscheidungen nicht nur von Technologie abhängen, sondern von Strategie, Finanzen und Menschen. Alles das sind zusätzliche Felder, die im Ingenieurswesen nicht so ausführlich gelehrt werden. Dort geht es viel mehr um die beste Lösung für das aktuell vorliegende Problem. Produktkosten zu hoch, kein Problem, dann machen wir ein Projekt zur Kostenreduktion. Die Konkurrenz hat ein neues Produkt und wir haben Ideen, es noch besser zu machen? Kein Problem. Projekt zu Produktneuentwicklung. Aber ist das überhaupt der richtige Weg? In Anbetracht der anderen Projekte, die gleichzeitig laufen sind die Ressourcen vielleicht an anderer Stelle besser aufgehoben. Aber das sind strategische Entscheidung, die macht das Management. Und ich möchte in der Lage sein hier die Richtige Sprache zu sprechen und das große Bild zu sehen, zu verstehen und beeinflussen zu können.
Die Suche nach einem berufsbegleitenden Master Studiengang mit Inhalten, die interessant sind. Hat mehrere Wochen und einige Beratungstermine gekostet, aber schlussendlich habe ich mich für das General Management Studium an der Hochschule Fresenius entschieden. Der Umfang und die Themen, die im Modulplan aufgezeigt wurde haben mich am meisten angesprochen.
Die Anmeldung zum Studium war schnell erledigt. Anmeldeformular für die 18 Monate Full-Power Variante unterschrieben, Bachelor Urkunde suchen und eine beglaubigte Kopie anfertigen lassen, Passbild und Personalausweis Kopie angehängt und fertig. Ein paar Tage später ging es dann los mit dem Zugang zum Online-Portal. Dort warteten 15 Module auf mich und ich habe mich zu denen angemeldet, die für das erste Semester empfohlen waren. Dann ging sie Los die Schlacht mit den eBooks. Jedes Modul hatte mindestens ein Fachbuch, das im Laufe des Moduls herangezogen wurde. Also lesen, lesen, lesen und noch mehr lesen.
Doch wie kann man sich das alles behalten, vor allem wenn es in den Abendstunden und am Wochenende passiert und unter der Woche Tagsüber ganz andere Themen im Mittelpunkt standen? Die erste Technik, die ich für mich ausprobiert habe war das sortieren der Information anhand eines digitalen Zettelkastens. Das habe ich mit dem Tool LogSeq aufgesetzt, aber es gibt viele andere Anbieter, die die gleiche Funktionalität haben. Nachdem ich das erste Buch (Methodenhandbuch der Betriebswirtschaftslehre, Amazon Affiliate Link, kauft es euch nicht!) in mehrere hundert Zettel zerlegt habe, aber danach hauptsächlich über das Zettelkasten Verfahren Bescheid wusste und nichts zu Methoden der Betriebswirtschaftslehre, habe ich meine Strategie geändert. Ich habe mir während ich gelesen habe jeden Absatz in eigenen Worten, handschriftlich, zusammengefasst. Dabei habe ich absichtlich darauf verzichtet, den Text zu tippen, denn handschriftlich kann ich wesentlich langsamer schreiben als ich denke. Das führte dazu, dass ich auch mehr über die Themen nachgedacht habe, während ich sie aufgeschrieben habe. Es war nicht komplett analog, ich habe mir ein Remarable2 gekauft, das ist wie ein Schreibblock, nur eben mit Digitalisierung um Hintergrund, sodass ich meine Notizen dann auch auf dem Monitor anschauen konnte. Nachdem ich das zweite Buch mit dieser Methode gelesen hatte und im Anschluss auch wusste, was der Inhalt ist, habe ich mich mit der Technik an die Klausurvorbereitung gemacht. Ich habe alle meine Zusammenfassungen durchgelesen und weiter, ebenfalls handschriftlich, zusammengefasst. Somit hatte ich am Ende um die 10 Blätter handschriftliche Zusammenfassung pro Buch und bin in die erste Klausur gestartet.
Die Klausur kann entweder alle zwei Monate Vorort, oder zu einem beliebigen Zeitpunkt online geschrieben werden. Das Anmeldefenster der Vorortstermine habe ich leider verpasst und wollte keine zwei Monate warten. Der Plan sah ja vor in 18 Monaten damit durch zu sein. Also dann eben die digitale Klausur. Anforderungen: Windows, Chrome und eine Webcam. Webcam hatte ich, das andere musste ich mir organisieren. Der Firmenlaptop hat es nicht erlaubt Chrome zu installieren, war also auch keine Alternative. Von Microsoft gab es für Studenten eine kostenlose Windows 11 Lizenz. Also habe ich mir eine VM aufgesetzt, darin Windows installiert und so meine Testklausur geschrieben. Technik funktioniert.
Bevor man mit der Klausur starten kann, muss man einmal seinen Personalausweis und den Studentenausweis in die Kamera halten, dann den Raum und die Umgebung aufzeichnen in der man die Klausur schreiben möchte und ab geht es. Ich musste erst mal meinen Schreibtisch von all dem Kram befreien, der da sonst so herum liegt. Das war keine leichte Aufgabe aber ich habe nicht lange gebraucht, bis sich das Chaos wieder auf dem Tisch ausgebreitet hat. Die Klausur wurde auf einer Webseite geschrieben, die im Vollbild angezeigt wurde. Chrome hat diverse Hotkeys von Windows deaktiviert, so konnte man beispielsweise nicht in einen anderen Tab wechseln, ohne dass die Klausur beendet wurde. Ist ja auch richtig, man soll die Klausur ja mit dem eigenen Wissen schreiben und nicht mit den Büchern im anderen Tab arbeiten. Allerdings hat die UX der Seite einen Nachteil. Es gab keine maximale Breite. So waren die Eingabefelder für Freitextantworten fast so breit wie das Browserfenster, also so breit wie der Monitor. Das ergibt auf einem Tablett oder Laptop auch Sinn. Aber ich habe an meinem Schreibtisch einen 34″ Ultra-Wide Monitor. Also gefühlt einen ganzen Meter Textfeld. Super unergonomisch so darauf zu schreiben. Und Fenster kleiner machen? Ging ja nicht, weil Klausurüberwachungsextension um Chrome. Aber ich bin ja nicht auf den Kopf gefallen, ich habe meiner VM einfach einen Full-HD Monitor verpasst, dann hat sich das Gaze in Grenzen gehalten und beim Filmen des Arbeitsbereiches hat man dann links, rechts, oben und unten graue Bereiche um das Fenster mit dem Browser gesehen. Hat geklappt. Wenn sich das überhaupt mal jemand angeschaut hat…
Jetzt aber rein in die erste Klausur. 30 Multiple Choice fragen, kein Problem, ein Punkt pro Frage. Zwei drein waren mir nicht sofort klar, kann ich aber später nochmal rein schauen, wenn ich die Freitextaufgaben gelöst habe. Es folgten 7 Freitextaufgaben zu je 10 Punkten. Ich legte los meine Antwort zur Frage 1 zu tippen, schneller als ich denken kann und so musste ich viel wieder raus löschen, weil sich die Finger verknotet haben. Aber geschafft, Frage 1 ist beantwortet. Etwas länger gebraucht als ich für die Frage im Zeitbudget hatte, aber was soll’s, die nächsten Fragen gehen bestimmt schneller. Frage zwei und drei liefen dann ganz gut, aber auch hier habe ich keine Zeit gut machen können. Bei Frage vier wollte ich am Ende die Absätze ein wenig umstellen, denn in einer andere Reihenfolge haben sie aufeinander aufgebaut. Also Strg+x zum Ausscheiden und Strg-v zum Einfügen. Aber nichts da. Der Text in der Zwischenablage wurde ersetzt mit „Das Einfügen von Text wurde durch das Klausur Überwachungs-Tool verhindert“. Strg+z ging übrigens auch nicht mehr. Mein kompletter erster Absatz war weg und ich hatte nur noch wenige Minuten Zeit um mich um die nächsten Fragen zu kümmern. Das ganze lässt sich auch in der Bewertung der Klausur erkennen. Gab es für die ersten beiden Fragen noch volle Punktzahl, hat das ab der vierten rapide abgenommen, nicht weil ich es nicht wusste, sondern weil ein Teil verloren ging und ich sowieso zu viel Zeit am Anfang verbummelt habe. Tja, das war es dann wohl mit der ersten Klausur. Ergebnis: 3,2.
Ich hatte aber keine Zeit zu verlieren, denn ich wollte ja in 1/12 Jahren fertig sein. Also nicht lange ärgern, die nächsten Klausuren habe ich dann Vorort handschriftlich verfasst und das hat geholfen. 1,0 und 1,3 kann sich sehen lassen. Manchmal ist es doch besser, wenn man langsamer schreibt. Vor allem wenn es keine zweite Iteration gibt in der man die Umsetzung gegen die Anforderungen abgleichen kann. Darauf folgten diverse Hausarbeiten mit anschließender Fragerunde und der Inhalt des ersten Semesters war im Kasten. Die Module des zweiten Semesters liefen auch ganz gut. Bis ich die Crux fand. Finance and Finance Organisation. Klingt harmlos, ist es mit BWL Bachelor wahrscheinlich auch. Aber ich musste erst mal lernen, wie eine Bilanz erstellt wird. Das hat ganz schön aufgehalten, dann kam noch dazu, das der zweite Teil des Moduls Risikomanagement war. Also gleich zwei sehr umfangreiche Themengebiete in einer Klausur. Ach-ja und als ich dann so weit war meine Klausur anzumelden… Fehlanzeige, die Anmeldefrist von 10 Tagen bezieht sich auf Arbeitstage und die sind im Frühsommer ja nicht unbedingt zwei Wochen. Also wieder eine Online Klausur. Ich wusste ja mittlerweile, dass ich Text nicht richtig editieren kann, also alles schön langsam und mit Bedacht getippt. Die Klausur ging 3 Stunden und ich war danach geistig ausgelaugt. So erschöpft habe ich mich noch nie gefühlt, weder nach einer anstrengenden Sport Session, noch nach intensiver Geistesarbeit. Aber ich habe es geschafft, nicht gut, aber geschafft. 3,0.
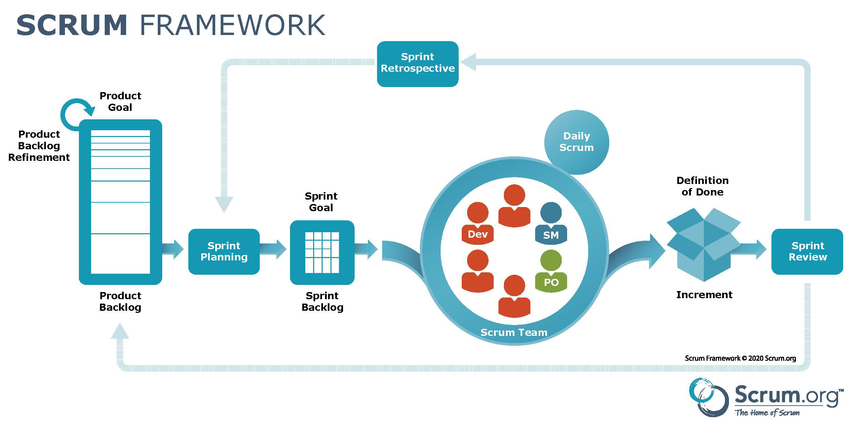
Der Inhalt des letzten Semesters kann kommen. Zwei Hausarbeiten und dann die Masterarbeit. Während ich für die Hausarbeiten der letzten beiden Semester recherchierte, habe ich ein Thema gefunden, dass ich auch im Berufsalltag spannend finde. Die Messbarkeit von Agilität. Hierzu wollte ich meine Arbeit schreiben, eine kleine Forschungsarbeit, die ich im Unternehmen durchführe, während ich meine eigentliche Arbeit auch noch machen darf. Ich habe mir zwar im Voraus zusichern lassen, dass ich die Masterarbeit im Unternehmen schreiben kann und dafür auch Zeit bekomme, aber wie das nun mal so ist, manche Themen warten nicht auf einen guten Zeitpunkt, sondern wollen gleich bearbeitet werden. Also habe ich die Richtung für meine Masterarbeit gefunden: Bewertung des Agilen Reifegrads der Entwicklungsabteilung. Doch ich konnte die Arbeit erst anmelden, wenn ich mindestens 85% der Credit-Points erreicht habe. Wie praktisch, dass das Abschließen aller Module mir 86% der erreichbaren CP geben. Da hat sich ja einer was bei gedacht. Nur blöd, dass ich dazu jetzt noch zwei Hausarbeiten abgeben muss. Also habe ich beide parallel erstellt. Natürlich zu zwei komplett unterschiedlichen Themen. wäre ja auch sonst zu einfach. Und nachdem ich dann endlich für die letzte Hausarbeit den Vortrag gehalten und einige Tage später die Note hatte, konnte ich meine Masterarbeit anmelden. Und dann? Das Prüfungsamt hat 4 Wochen Zeit die Anmeldung zu bearbeiten, haben sie auch ausgenutzt. Also wieder ein Monat vorbei. Der Plan die Arbeit noch bis Dezember 2024 zu schreiben war also dahin. Ich durfte erst im Oktober damit startet.
Die Arbeit bestand aus dem Auswerten eines Fragebogens, dieser musste aber erst einmal von möglichst vielen Mitarbeitern ausgefüllt werden. Und wenn man in einem Unternehmen mit Betriebsrat eine Befragung von Mitarbeitern durchführen will, dann gelten da klare Regeln, was abgefragt werden darf und was nicht. Also habe ich ungefähr einen Monat damit verbracht die Fragebogen zu erstellen und ihn sowohl von der Personalabteilung als auch dem Betriebsrat freigeben zu lassen. Dann vier Wochen Befragungszeit und schon war Dezember. Ich habe also die Auswertung der Befragung in die Weihnachtspause mitgenommen. Den Januar habe ich damit verbracht die eigentliche Arbeit zu schreiben, die Ergebnisse zu diskutieren und alles Rund zu bekommen, der Februar ging für das Lektorat drauf und im März habe ich dann endlich abgegeben. Nach 26 Monaten hatte ich meinen MBA in General Management abgeschlossen. Klingt verrückt? War es auch.
Dabei habe ich nicht nur viel über Methoden zum Lernen von neuem Fachwissen und zur Stressbewältigung gelernt, sondern auch verschiedene Perspektiven innerhalb der Betriebswirtschaftslehre eingenommen. Dabei habe ich viele neue Dinge gelernt und spannende Einblicke in andere Unternehmensstrukturen bekommen. Immerhin habe ich bisher nur in einem Unternehmen gearbeitet. Die Hilfsarbeiter Jobs während der Schulzeit und mein Work-and-Travel Jahr lasse ich mal außen vor.
Das was ich in diesen zwei Jahren gelernt habe lässt sich nicht so einfach zusammen fassen. Aber was wirklich zählt, ist nicht die Theorie allein, sondern die Fähigkeit, verschiedenste Perspektiven zu verbinden. Und das habe ich gelernt.