Mein Projekt, die Wohnung komplett über ein Automationsbus zu steuern, geht langsam voran. Aber warum noch ein Haus Automations Bus? Weil die bereits verfügbaren nicht genau dem entsprechen, was ich gerne hätte. Einige sind auf eine dauerhafte Verbindung ins Internet angewiesen, andere sind zu teuer, oder nicht vollständig. Oder benötigen Datenleitungen zu den Knotenpunkten.
Herbert wird einmal die Wohnung steuern und dafür werde ich existierende Hardware umbauen, oder eigene Hardware entwerfen, die genau die Aufgaben erfüllt, die ich mir von einem Hausbus wünsche. Der Aufbau wird folgende Topologie besitzen:
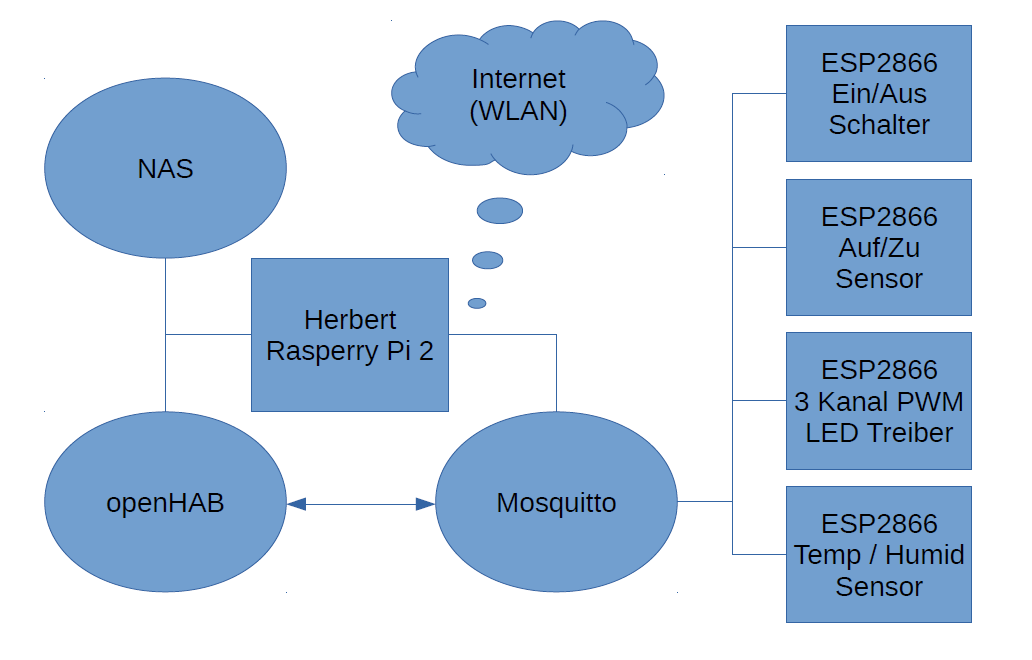 |
| Herbert Topologie V2.0 |
Das Zentrum von Herbert ist ein Raspberry Pi 2, der in einem externen Festplattengehäuse untergebracht ist. Die externe Festplatte ist immer noch in dem Gehäuse und wird die Speicherzentrale für das NAS. Der Pi hat leider nur langsames USB 2.0. Da das WLAN und die Festplatte über USB angeschlossen sind werden keine neune Geschwindigkeitsrekorde aufgestellt werden können. Für regelmäßige Backups ist es allerdings schnell genug.
 |
| Herbert 2.0 |
Neben dem NAS besitzt Herbert ein openHAB Interface. openHAB ist ein offenes Haus Automation System, dass in Java entwickelt wurde, dadurch ist es auf vielen Plattformen lauffähig. Es besitzt Module um viele bereits verfügbaren Systeme zusammen zu schließen und über die eine Plattform zu steuern. Ich habe mich entschieden die Kommunikation über MQTT zu lösen. MQTT ist eine Kommunikationsplattform für Maschine-zu-Maschine Kommunikation. Man kann sich ein einem Verteiler (Broker) anmelden und für verschiedene Nachrichten anmelden. Danach erhält man die Nachrichten auf diesem Kanal. Der Part des Brokers wird von der offenen Software Mosquitto übernommen, die ebenfalls auf dem Raspberry Pi läuft.
Die Firmware NodeMCU besitzt ein Lua Modul, dass die Kommunikation mit einem MQTT Broker sehr einfach gestaltet. Das Modul mqtt.Client() bietet Funktionen zum Anmelden für Nachrichten, als auch zum Verschicken von Nachrichten.
Diese Nachrichten werden an vereinbarte Topics gesendet. Diese sind in der Konfigurationsdatei von openHAB und in der Lua Quelltext abgespeichert. Weitere Funktionen des NodeMCU sind der Stromsparende Tiefschlafmodus und die Kommunikation über die serielle Schnittstelle. Beide dieser Funktionen werden an unterschiedlicher Stelle benötigt. Der Tiefschlaf ist für die Sensoren notwendig, wenn diese nur Nachrichten senden, aber keine Empfangen sollen. Die serielle Schnittstelle ist für die Kommunikation mit einem anderen Controller gedacht, der dem ESP die nötige Berechnungspower zur Verfügung stellen kann.
Der Auf/Zu Sensor ist in der Aktuellen Version dem Fensterwächter sehr ähnlich. Allerdings ist er noch nicht so weit veröffentlicht zu werden. Alle Module mit allen Programmen und Schaltungen werden aber in der nächsten Zeit hier zur Verfügung stehen. Der Code und die Konfigurationsdateien für Herbert liegen ebenfalls auf GitHub.
Resourcen:
Raspberry Pi Debian Variante: Rasbian
openHAB Dokumentation + Autostart Anleitung
MQTT auf dem Raspberry Pi installieren
NodeMCU API Dokumentation