Ich habe mir die smarte WiFi-Steckdose S20 von itead bestellt.
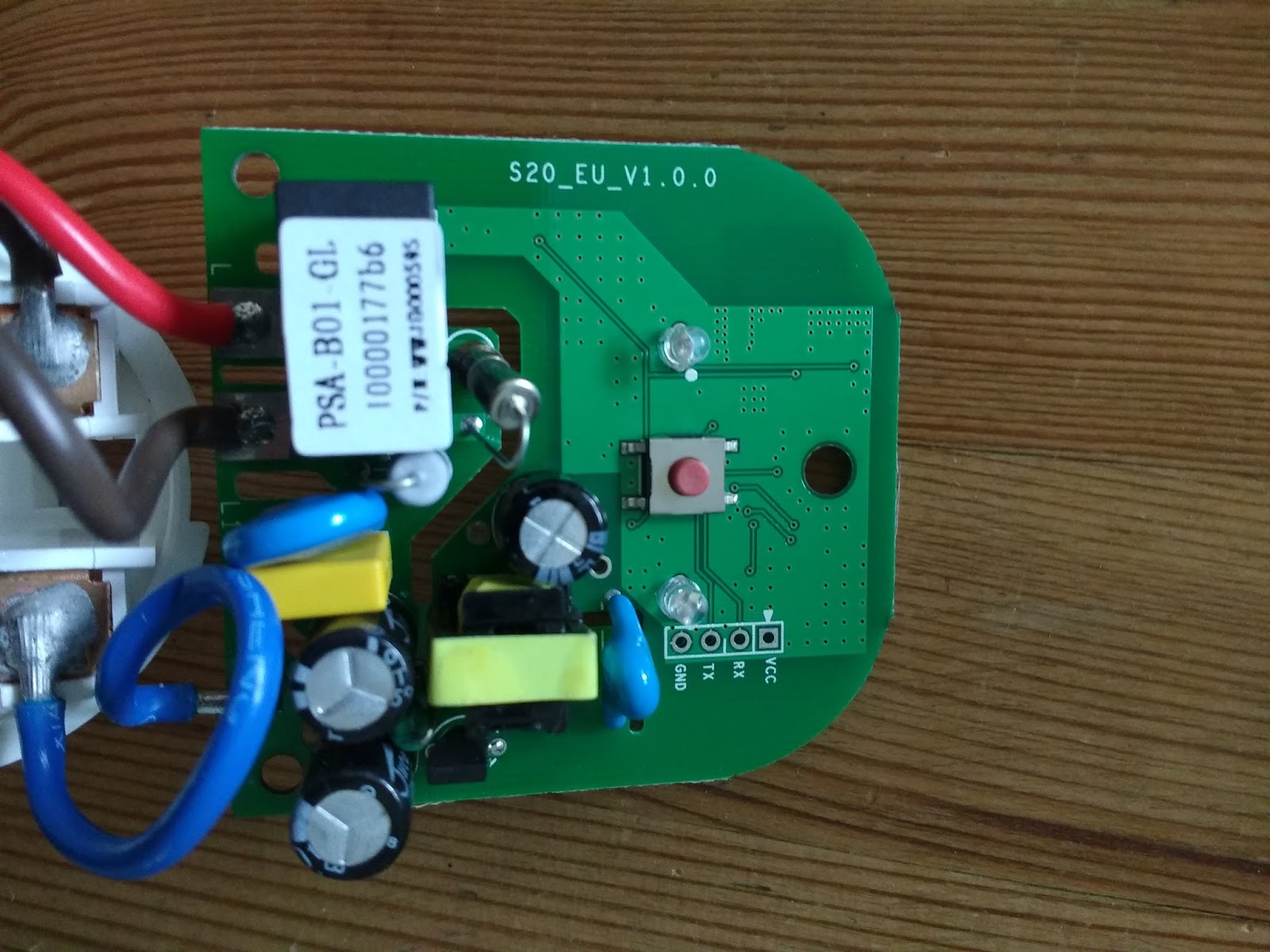  |
| Das Board in der Steckdose von vorne und hinten |
Bei betrachten der Leiterplatte sieht man, dass ähnlich wie beim Sonoff Smart Switch ein AC/DC Konverter verbaut ist. Der Controller für die LEDs, den Schaltzustand und WiFi ist ein ESP8266. Der Programmier-Port ist auf 2,54mm Raster herausgeführt. So kann mit einem einfachen USB auf UART Kabel die Programmierung vorgenommen werden. Wichtig ist, dass zur eigenen Sicherheit die Programmierung nur vorgenommen wird, wenn das Board nicht in der Steckdose steckt!
Jetzt auf Amazon kaufen: Sonoff Smart Home WLAN Wifi Strom Schalter Der Siebdruck zeigt, wie die Serielle Schnittstelle verbunden werden muss. Dazu kann entweder eine Stiftleiste eingelötet werden, oder eingepresst. Ich habe mich für die zweite Variante entschieden und eine 2,54mm Stiftleiste leicht mit der Zange verbogen, sodass die Pins nicht ganz sauber in einer Reihe sind, sondern leicht versetzt. So werden die Pins in den Löchern an die Oberfläche gedrückt und stellen eine Verbindung her.
Der Siebdruck zeigt, wie die Serielle Schnittstelle verbunden werden muss. Dazu kann entweder eine Stiftleiste eingelötet werden, oder eingepresst. Ich habe mich für die zweite Variante entschieden und eine 2,54mm Stiftleiste leicht mit der Zange verbogen, sodass die Pins nicht ganz sauber in einer Reihe sind, sondern leicht versetzt. So werden die Pins in den Löchern an die Oberfläche gedrückt und stellen eine Verbindung her.
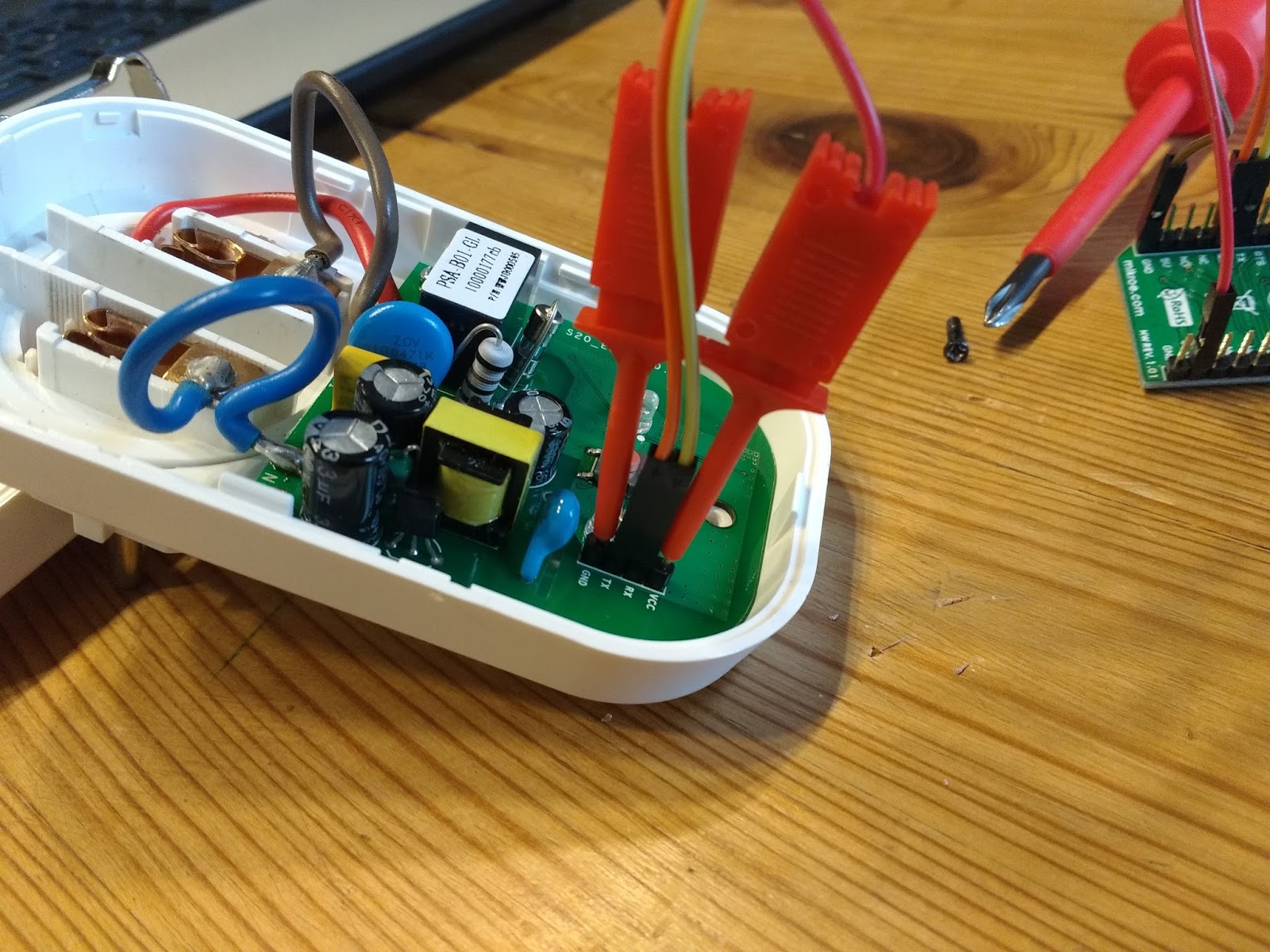
Angeschlossen wird der USB auf UART Adapter wie folgt:
Wichtig ist, dass RX und TX also Receive und Transmit jeweils getauscht sind, nur so können die beiden Geräte miteinander kommunizieren. Um den ESP8266 in den Bootloader-Modus zu bringen, muss beim Power-Up der GPIO0 Pin auf Masse gezogen sein. Das ist beim S20 mit dem An/Aus Taster gelöst. Wenn der Taster gedrückt ist, wenn Spannung angelegt wird, schaltet der ESP8266 den Boot-Loader an und kann über die Serielle Schnittstelle programmiert werden.
Programmieren kann man den ESP8266 über viele Wege. Ich habe in einem früheren Blog-Post bereits davon gesprochen, dass ich mit hilfe der NodeMCU LUA Umgebung die Sonoff Smart Switches programmiert habe. Davon bin ich jedoch wieder weg, da ich kein vernünftig funktionierenden Update-Mechanismus hatte. Ich habe darauf hin dieses Projekt gefunden und erfolgreich bei mir eingesetzt.
So lässt sich mit diesen Schritten die S20 Smarte WiFi-Steckdose umprogrammieren.
Schritt 1: Firmware Image herunterladen
Ich habe heute versucht mit der aktuellesten Version der espurna Firmware ein Image zu erstellen. Das hat aber nicht funktioniert. Ich habe allerdings noch eins, das schon etwas älter ist, aber gut funktioniert. Das habe ich hier hochgeladen. Zum programmieren des S20 Controllers benötigt man beide .bin Dateien: fimware.bin und spiffs.bin. Das Programm mit dem die Firmware-Images auf den Speicher des S20 Boards geladen werden kann findet man auf GitHub, Ich habe idie Links für die 32bit und 64bit Version rausgesucht und kann ebenfalls unter dem Link gefunden werden. Ansonsten könnt ihr das Programm esptool verwenden. Das kann man auch im Internet kostenlos finden.
Schritt 2: S20 anschließen und Firmware hochladen
Wenn ihr die beiden Firmware Images und das Programmiertool heruntergeladen habt, müsst ihr nun ein Konsolenfenster öffnen und in das passende Verzeichnis wechseln.
![]() Jetzt müsst ihr den passenden COM Port für das USB auf UART Interface finden. Ich verwende Linux und da heißt das Interface /dev/ttyUSB0 unter Windows heißt es COM16 oder eine andere Zahl.
Jetzt müsst ihr den passenden COM Port für das USB auf UART Interface finden. Ich verwende Linux und da heißt das Interface /dev/ttyUSB0 unter Windows heißt es COM16 oder eine andere Zahl.
![]() Anschließend stecken wir das S20 Board mit gedrückter Taste an den USB Anschluss. Der ESP8266 startet jetzt im Bootloader-Modus. Das Programmiertool kann jetzt ein neues Firmware Image auf den Speicherchip laden.
Anschließend stecken wir das S20 Board mit gedrückter Taste an den USB Anschluss. Der ESP8266 startet jetzt im Bootloader-Modus. Das Programmiertool kann jetzt ein neues Firmware Image auf den Speicherchip laden.
Mit dem nodeMCU Firmware Programmer kann man unter Windows ganz einfach den ESP8266 programmieren. Dazu müsst ihr nur beide Images angeben und den Offset für das spiffs.bin Image eintragen.

Um mit dem esptool zu arbeiten, muss folgende Zeile im Konsolenfenster ausgeführt werden:
esptool -vv -cd ck -cb 115200 -cp „COM16“ -cf firmware.bin
Darauf hin wird das Firmware Image übertragen. Als nächstes müssen wir einen Reset durchführen, also USB Kabel wieder abziehen und erneut mit gedrücktem Taster einstecken. Jetzt ist der Controller wieder im Bootloader Modus und wir können das Dateisystem hochladen.
esptool -vv -cd ck -cb 115200 -cp „COM16“ -ca 0xbb000 -cf spiffs.bin
Danach ist das S20 Board komplett umprogrammiert und kann über ein eigenes Netzwerk erreicht werden.
Schritt 3: Netzwerk-Zugang einrichten
Wenn das S20 neu programmiert wurde, kennt es noch keine Netzwerk-Zugänge. Daher startet es im AP Modus. Das heißt, es erzeugt einen Access-Point. Dieser heißt S20-XXXXXX. Die X sind abhängig von der MAC Adresse des ESP8266 und bei jedem Gerät unterschiedlich. Es handelt sich um ein Netzwerk, dass mit dem Passwort „fibonacci“ gesichert ist.
Wenn ihr mit dem Netzwerk verbunden seid, könnt ihr unter der IP Adresse 192.168.4.1 das Admin-Interface der Smarten Steckdose finden. Dort können unter dem Punkt WIFI bis zu drei verschiedene Netzwerk-Zugänge angelegt werden. Wenn nach einem Neustart oder Verbindungsabbruch der ESP8266 eine neue Verbindung herstellen muss, werden diese drei Zugänge der Reihe nach ausprobiert. Wenn keine Verbindung erfolgt, wird wieder auf den AP-Modus ausgewichen.
Schritt 4: Schalten des Relays
Das Relay kann über mehrere Methoden geschalten werden. Die einfachste ist das Schalten über eine HTTP Adresse
http://192.168.0.145/relay/on
http://192.168.0.145/relay/off
Die IP-Adresse ist natürlich an die Adresse der S20 Steckdose anzupassen.
Die Software bietet auch die Möglichkeit in ein MQTT Netzwerk integriert zu werden. Das verwende ich bei mir den damit kann man viele verschiedene Geräte mit einem gemeinsamen Protokoll zu verwalten. Im Admin-Interfache der Steckdose findet man auch den Punkt MQTT. Dort können die Zugangsdaten für den MQTT Server eingetragen werden. Die Software verbindet sich dann automatisch mit dem Broker und die Steckdose kann über MQTT Nachrichten gesteuert werden.