Feedback / Neuigkeiten
Es gibt wieder Feedback zu besprechen. Für die Lötstation von Raphael gab es den Tipp die Schaltung galvanisch getrennt aufzubauen. Denn sonst kann es sein, dass die Lötspitze eine Spannungsdifferenz zu dem Lötpunkt hat.
Außerdem hat Chris von einem 3d-gedruckten Pick and Place erzählt. Dazu haben wir eineige Links versprochen:
- https://github.com/openpnp/openpnp-openbuilds/wiki/Build-Instructions
- https://mcuoneclipse.com/2018/06/26/building-a-diy-smt-pickplace-machine-with-openpnp/
- https://hackaday.com/2018/02/09/custom-parts-feeder-aims-to-keep-pace-with-pick-and-place/
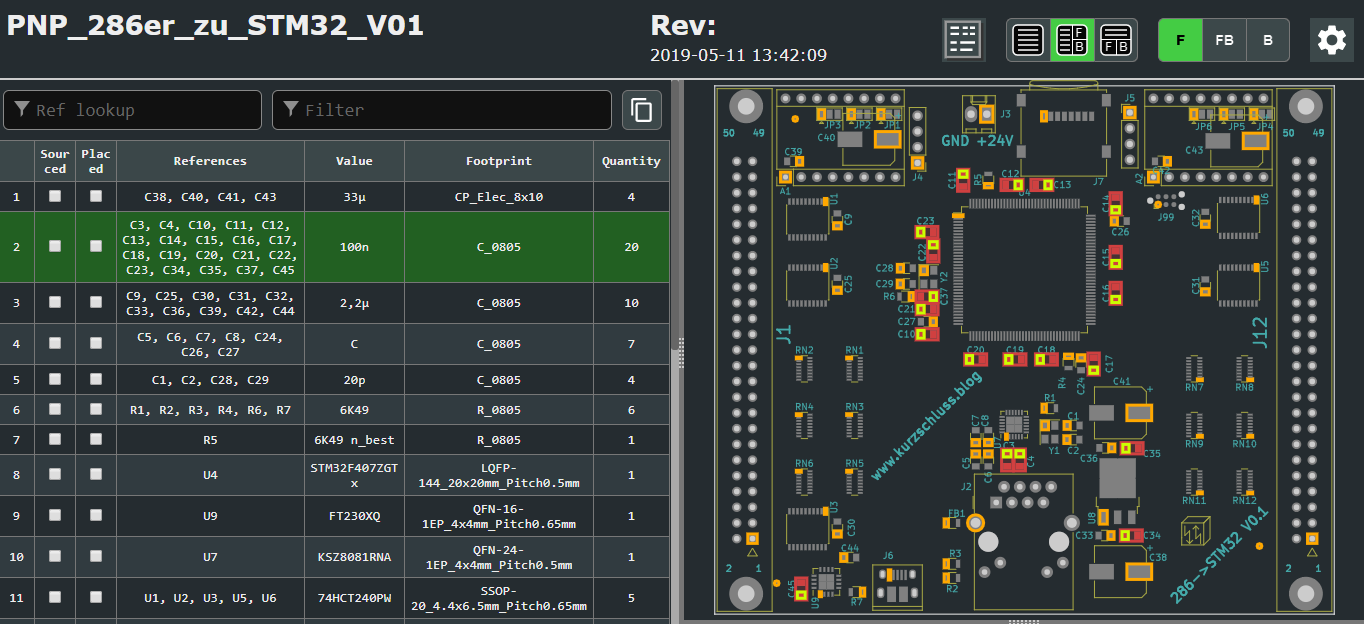
Basti erzählt von seinem Lebenslauf und wie er in die Elektronik Entwicklung gekommen ist. Aktuell arbeitet er an einem CPU Modul
Common-Sense-Tipps
Als Verfeinerung des Tipps aus 0x0e könnt ihr natürlich auch die Zeile der BOM als Refernez beim Bestellen angeben, dann müsst ihr nciht aus der langen Liste der Refernzen eure passende heraussuchen.
Außerdem schlägt Basti vor, alternative Quellen für Bauelemente direkt mit zu evaluieren, um so im Falle einer Lieferkanppheit auf ein alternativ Typ wechseln zu können.
Wir sind gebeten worden für einen Anfänger ein paar Werkzeuge zusammen zu stellen. Das haben wir auch gemacht und haben zwei Listen zusammen gestellt. Eine für Einsteiger, mit günstigen aber ausreichenden Werkzeugen und eine für Fortgeschrittene, mit besseren Werkzeugen
- Einsteiger https://amzn.to/2Ng6E6h
- Fortgeschritten https://amzn.to/2AwkF7L
Basti hat bei der Suche auch eine neue Art von Bauelemente Aufbewahrung entdeckt und gleich bestellt.
Schmart Watch
Das Schmartwatch Projekt wird bald weiter gehen, Basti wird versuchen mit einem Niedertemperatur Lot das Flex Board zu löten. Wenn das wieder nicht funktioniert, wird er auf FR4 umsteigen um das Projekt endlich zum Abschluss zu bringen. – Zur Veröffentlichung dieser Folge sind bereits neue Boards unterwegs.
Idea to Product
Hier ging es auch ein großes Stück weiter. Basti hat sich für ein Konzept entscheiden, dass mit Hilfe von Infrarot-Reflektion arbeitet. Das Funktionsprinzip ist unten dargestellt.

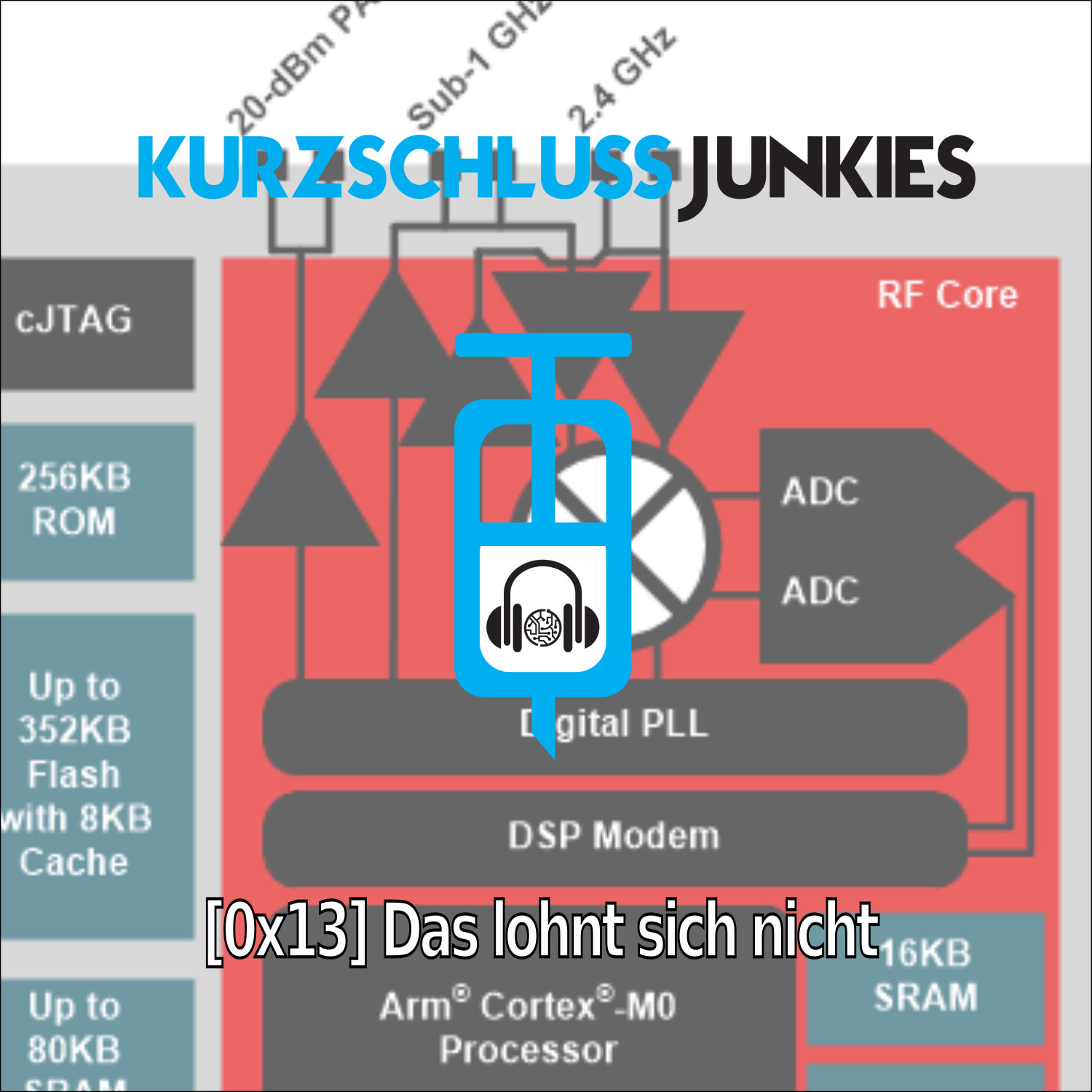
Durch die Verschiebung der Reflektion lässt sich eine Kennlinie ermitteln, die das Inverse des Abstands darstellt. Somit ist das Messen des Abstands zur Oberfläche erledigt. Zum Übertragen der Daten hat Basti den CC1352P ausgesucht. Der Kann die gängigen Funkstandards wie BLE, WiFi, Sub GHz und hat einw Doppelkern Lösung aus M0 und M4F. Für BOM Kosten kommt Basti auf 10-11€ pro Sensor. Das ist mit den Entwicklungskosten mit einem Absatz von 5000 Stück im ersten Jahr nicht lukrativ. Sobald die 5k Menge überschritten ist, wird das ganze allerdings lohnender.
Chip der Woche
Wie im letzten Kapitel angesprochen heute der CC1352P. M4F Microcontroller von TI mit zwei Kernen, 532kb Applikationsspeicher uind 256kb für Netzwerkstacks. Die 80kb RAM können einen längerne Deep-Sleep überstehen, für Sensordaten gibt es den TI Sensor-Controller, der hat ncoh mal 4kb SRAM. Der Controller läuft ohne CPU, kann also extrem Stromsparend sein.