Wir haben den Podcast in einem Livestream aufgenommen. Vielleicht machen wir das jetzt immer so.
Common Sense Tipps
Basti: Kauft euch die kritischen Bauelemente (alles wofür es keine Alternative gibt) bevor ihr eure Platte entwickelt oder bestellt. Chris: Hobby zum Beruf machen, oder besser: Habt Spaß am Job, alles andere erfüllt euch nicht.
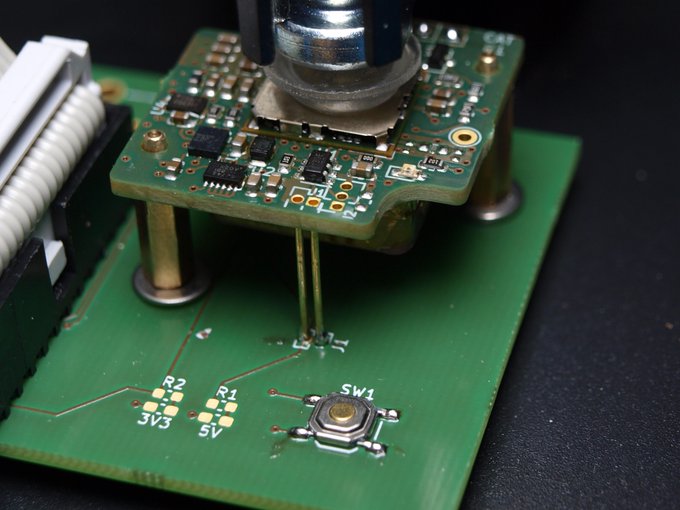
Pick and Place
Die Endschalter sind jetzt erfolgreich angeschlossen. Es waren notwendig Pullup Widerstände dran zu machen.
IndiaNavi
ESP32 Version läuft. Display macht noch Probleme, aber es ist noch nicht klar, woher die kommen und was sie verursacht.
„Chip“ der Woche
BQ25171-Q1 von TI. Ein Ladechip für viele verschiedene Batterietypen.
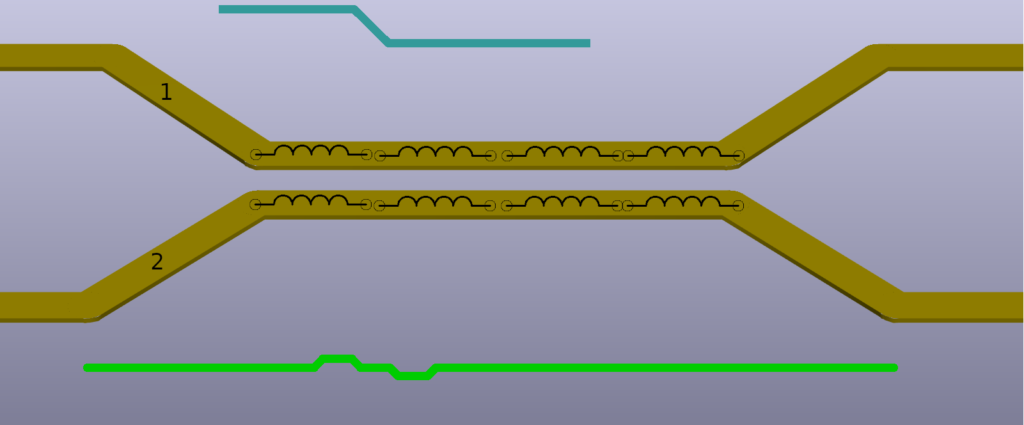
Wie im Artikel über die kapazitive Kopplung beschrieben betrachten wir Microstrip Leiter. Betrachten wir zuerst die kurze Koppelstrecke. Dabei induziert das Magnetfeld der Leitung 1 in Leitung 2 eine Spannung, die in Richtung der Quelle eine positive und in Richtung der Senke eine negative Auslenkung hat.
Gehen wir jetzt davon aus, dass die Strecke länger ist, summiert sich der Fehler in Richtung Senke. In Richtung Quelle verlängert sich der Impuls.
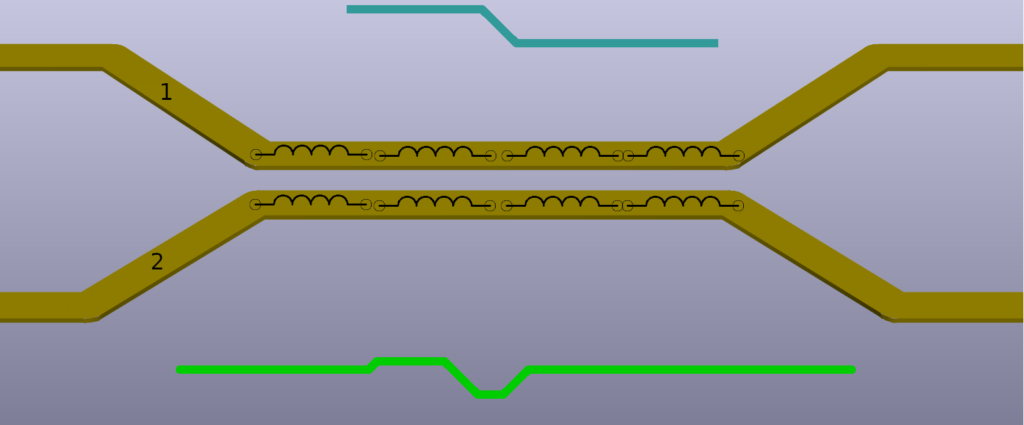
Betrachten wir jetzt das Ende der Koppelstrecke, bewegt sich der Impuls in Richtung Quelle und Senke weiter.
Wie bereits gezeigt, koppelt kapazitiv ins positive und induktiv ins negative. Und bei der Stripline sind die Störgrößen auch identisch. Heißt, wenn wir alles betrachten, erhalten wir folgendes Bild der Störung:
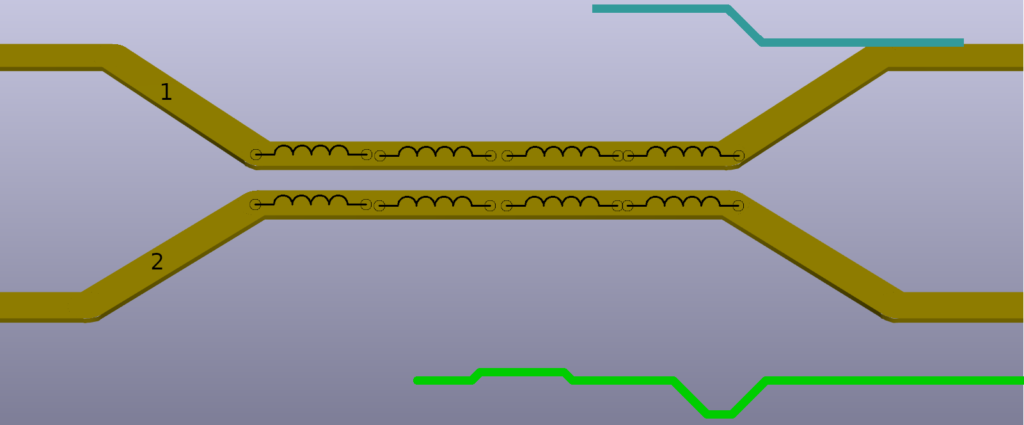
Die Störung in Richtung Senke ist verschwunden und die Störung in Richtung Quelle ist so lange wie die Koppelstrecke, und addiert sich. Zu Beginn haben wir gesehen, dass Microstrip und Stripline sich in der Symmetrie des Dielektrikums unterscheiden und daher die induktive Kopplung nicht von der kapazitiven Kopplung ausgelöscht werden kann.
Und so beeinflussen wir die Signale an nahe aneinander verlaufenden Kupferbahnen auf Leiterplatten.
Beim Übersprechen koppeln Signale in angrenzende Leitungen ein und können dort Probleme verursachen. Um Übersprechen zu verstehen betrachten wir die Signale auf der Leiterplatte und deren kapazitive Kopplung. Im nächsten Artikel betrachten wir die induktive Kopplung. Die Kombination aus beidem ist, was wir uns zum Schluss anschauen.
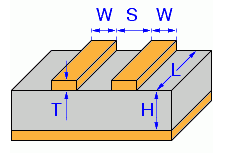
Betrachtet wird eine Stripline Konfiguration bei der die Leitungen in der der Leiterplatte liegen und eine GND als Referenzfläche darüber und darunter verläuft. Somit sind die induktiven Störeinflüsse und die kapazitiven Störeinflüsse gleich groß.
Stripline: GND auf beiden Seiten, Leiter verläuft in der Platine vergraben.
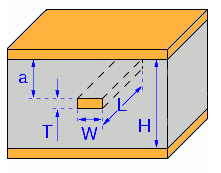
Bei der Microstrip Konfiguration liegen die Leiter auf der Außenseite der Platine, das ist die wahrscheinlichste Konfiguration bei 2 oder 4-Lagen Leiterplatten. Da hier das Dielektrikum ungleich ist, also FR4 (ɛr ≈ 4) und Luft (ɛr ≈ 1) ist die kapazitive Beeinflussung geringer.
Microstrip: GND Fläche als Referenz und Signale laufen darüber. Die Signale befinden sich an der Außenseite der Leiterplatte.
Kapazitive Kopplung
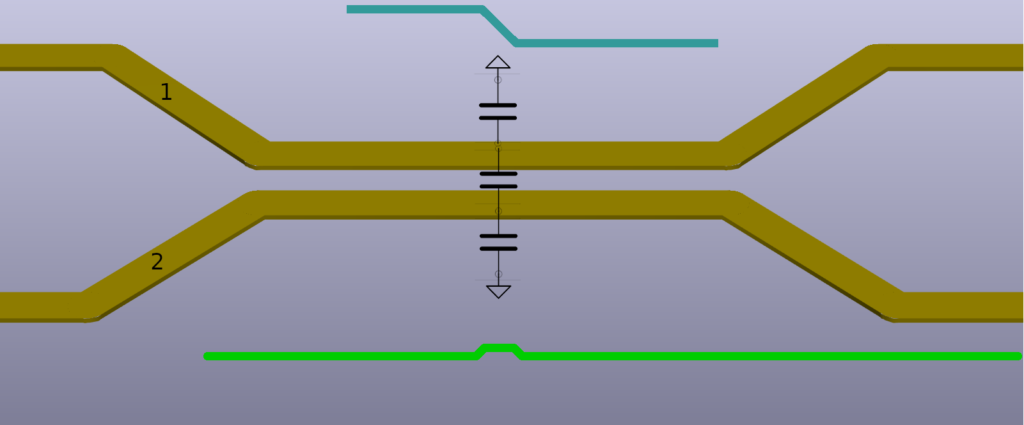
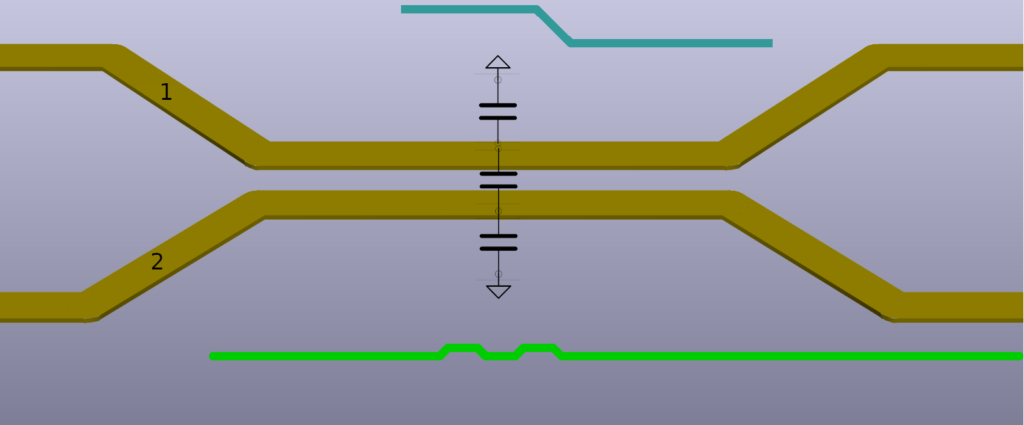
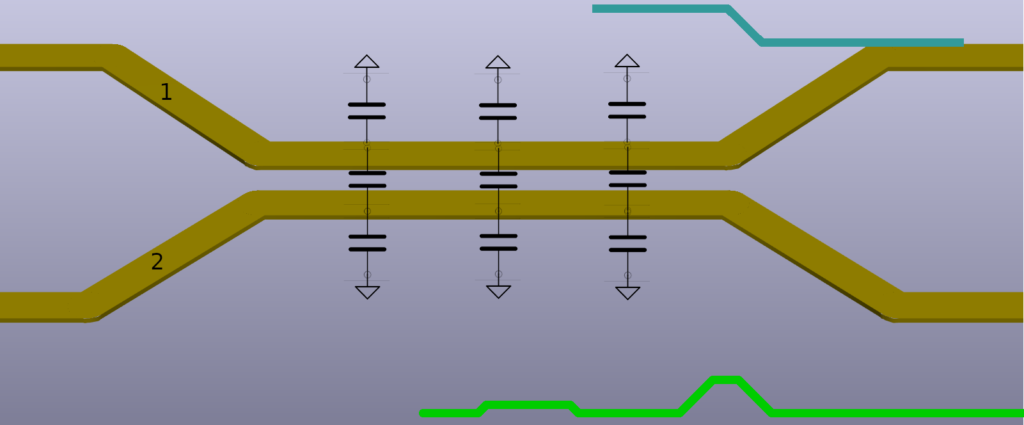
Bei der kapazitiven Kopplung werden in den beeinflussten Leiter Fehlerströme eingebracht. Leiter 1 und 2 haben eine kurze Beeinflussungsstrecke, hier mit einem C gekennzeichnet. Die beiden Leitungen haben Referenz auf GND und sind damit Kapazitiv miteinander verbunden. Leiter 1 ist der Aggressor und hat eine Signalflanke die sich von der Quelle (links) zur Senke (rechts) bewegt.
Das Signal (oben in blau) wechselt in Leiter 1 und verursacht einen Verschiebestrom durch die Kapazitäten. Dieser Strom fließt auch in Leiter 2. Die Beeinflussung findet nur statt, wenn ein Verschiebestrom fließt, also wenn eine Signalflanke vorbei kommt.
Bei statischem Signal kommt es zu keiner Beeinflussung und die gekoppelte Störung wandert sowohl zur Quelle als auch zum Ziel. Sie bewegt sich in beide Richtungen!
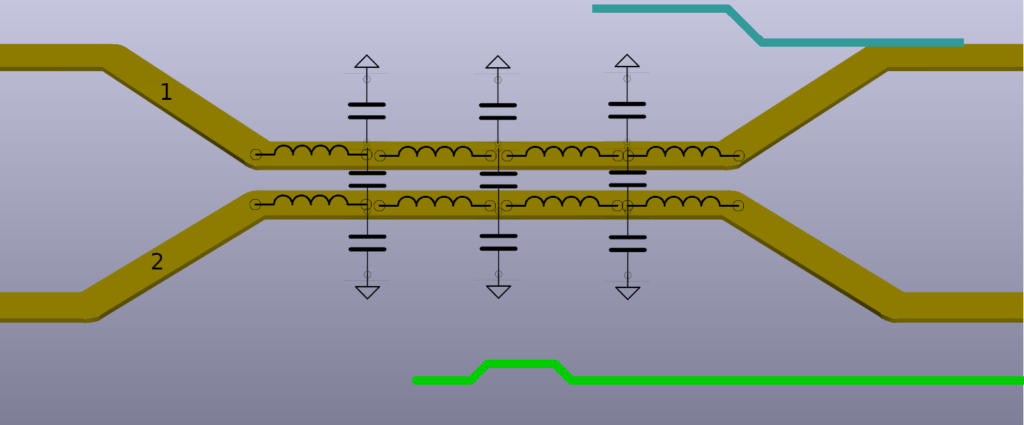
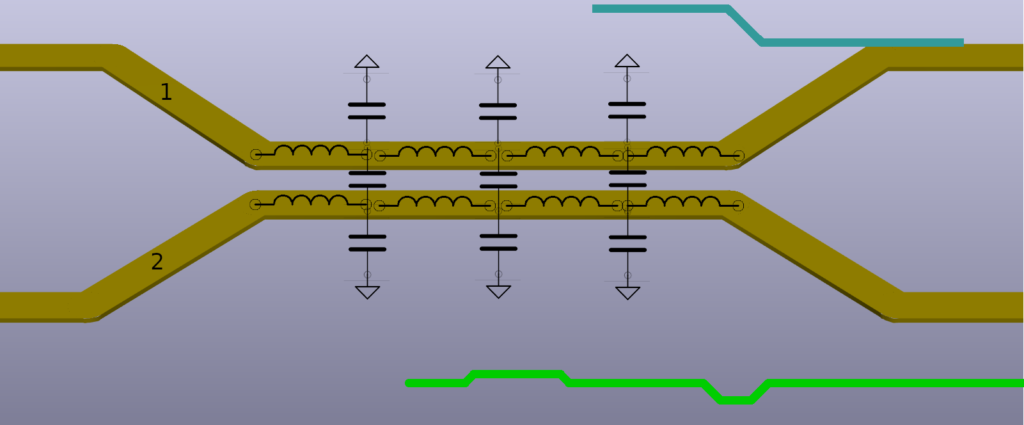
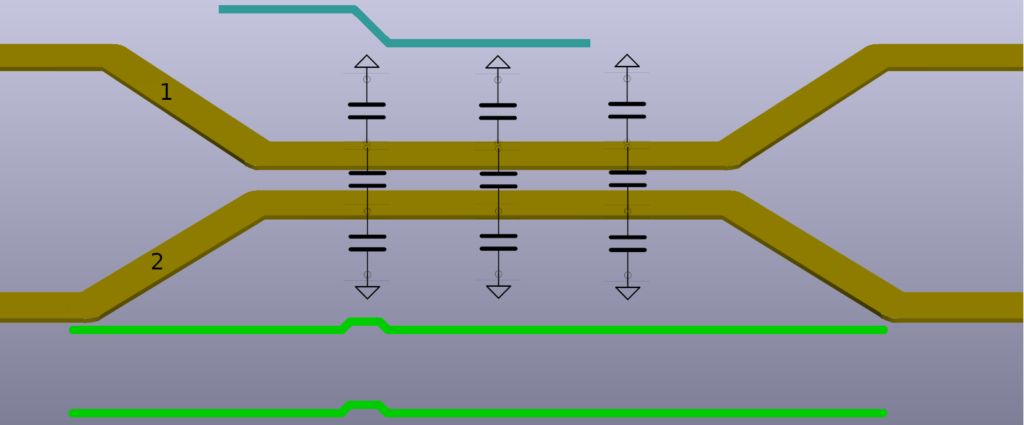
Betrachten wir jetzt die Situation, wenn eine lange Koppelstrecke vorhanden ist. Hier dargestellt mit drei Kapazitäten:
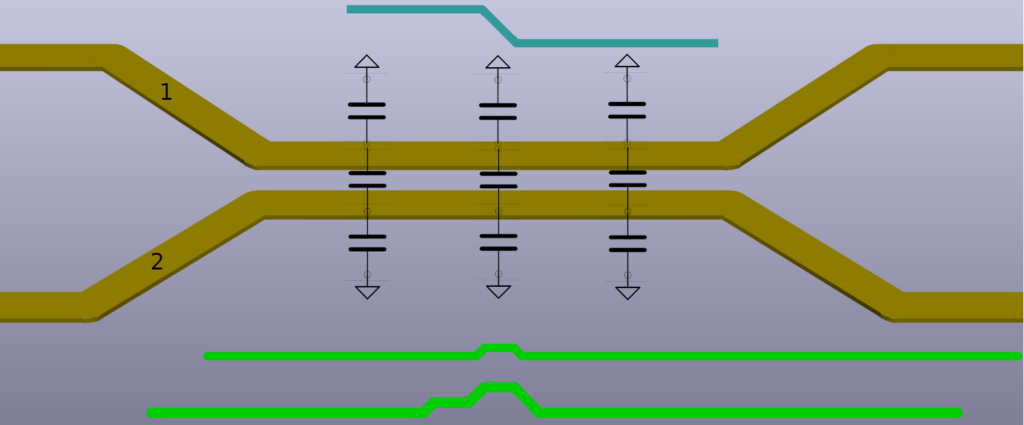
Initial entspricht das Störsignal (obere grüne Kurve) dem der kurzen Koppelstrecke. Wenn jetzt die Signalflanke auf Leiter 1 weiter wandert, kombinieren sich die Störungen zu dem in der folgenden Abbildung gezeigten Störsignal
Der zur Senke wandernde Störimpuls wird mit dem neuen kombiniert und erhöht den Strom an dieser Stelle. Der zur Quelle wandernde Impuls wird länger, seine Amplitude steigt nicht. Er hat sich von der Beeinflussung bereits entfernt.
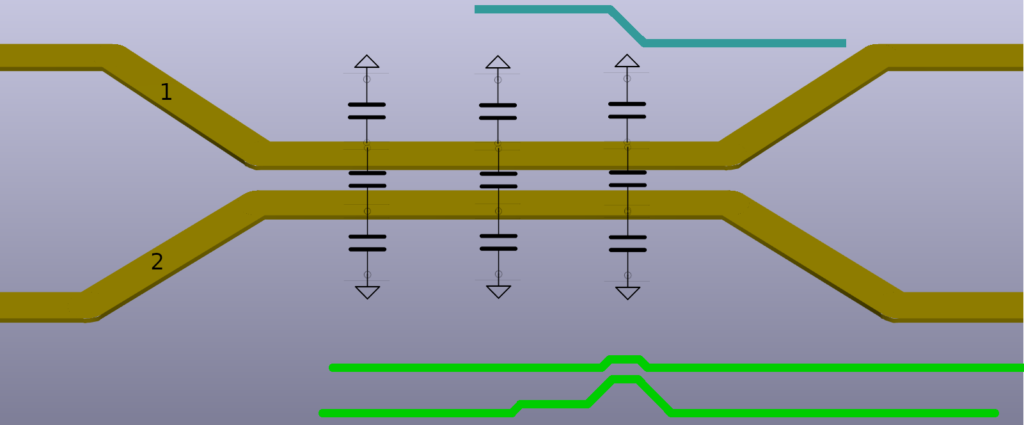
Je länger die Koppelstrecke ist, desto länger wird der zur Quelle laufende Störimpuls und desto größer wird der zur Senke wandernde Impuls. Die nachfolgende Abbildung zeigt die wandernden Signale nachdem die Flanke in Leiter 1 die Koppelstrecke verlassen hat.
Die Störsignale wandern nun entlang der Signalleitung 2 zur Quelle (nach links) und zur Senke (nach rechts)
Im nächsten Artikel betrachten wir die induktive Kopplung und wo die Induktivität der Leitung Fehlerströme induziert.
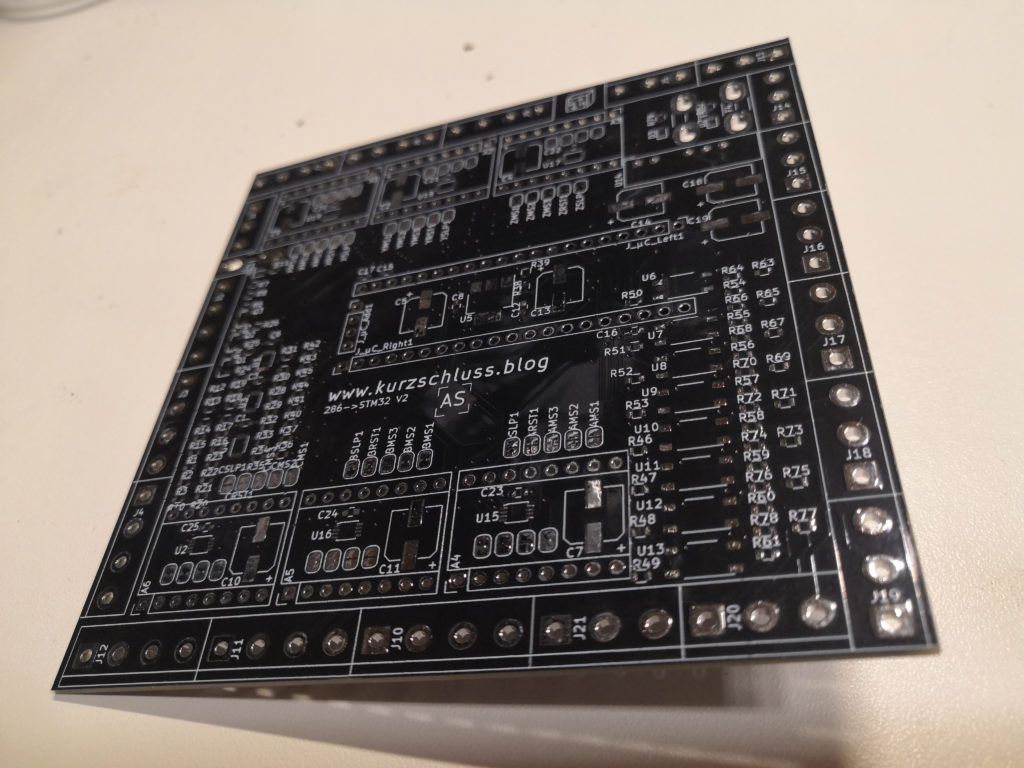
Vor einigen Wochen haben wir im Podcast erwähnt, dass es bei dem Bestückautomat weiter geht. Nachdem wir jetzt endlich den Kopf haben und die notwendigen Kabel, konnte sich Chris an die zweite Version des Mainboards setzen.
Schwarzer Lötstopplack reflektiert sehr stark.
Dank der freundlichen Unterstützung von PCBWay haben wir diesmal auch nichts für das Mainboard bezahlt. Zusammengelötet haben wir das ganze dann in einem Lifestream. Es fehlte zwar ein Bauteil (das haben wir im falschen Gehäuse bestellt) aber wir haben alle andern Teile bestückt und müssen jetzt nur noch die fehlenden Teile nachlöten.
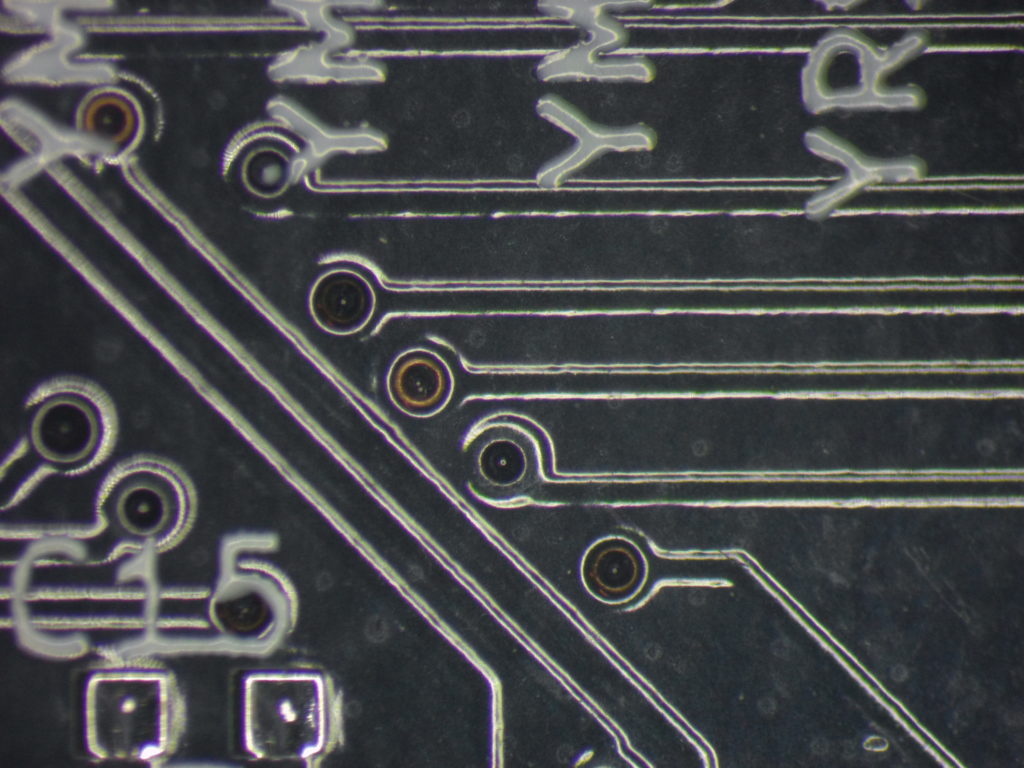
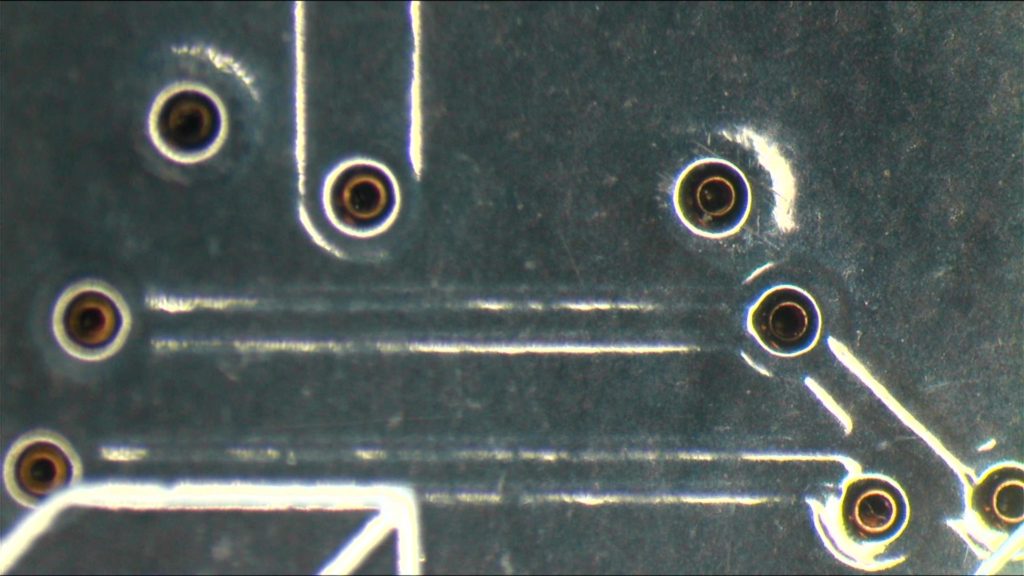
Via Bohrlöcher sind genau getroffen.Auch auf der Rückseite kommen die Bohrlöcher mittig aus der Via
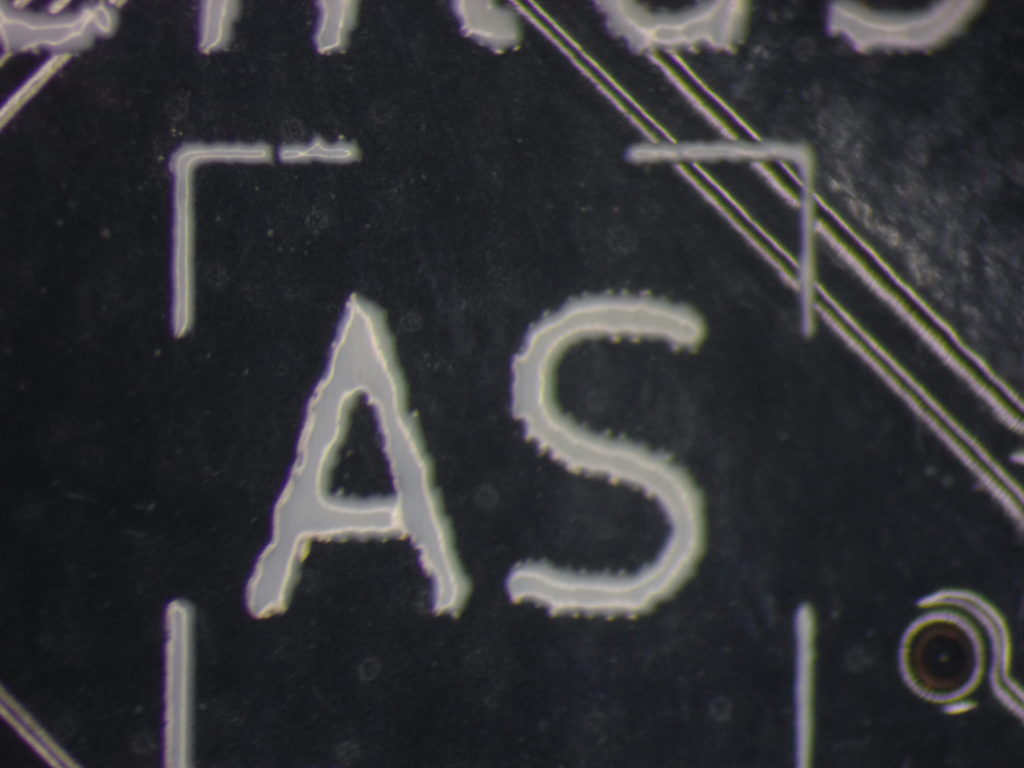
Das Board ist in Schwarz gehalten und hat daher zu dem weißen Siebdruck einen deutlichen Kontrast. Der Siebdruck ist jedoch eine irreführende Bezeichnung. Denn bei diesen Prototypen Leiterplatten wird selten ein Sieb hergestellt zum Bedrucken, sondern sie werden mit einem Tintenstrahl Drucker bedruckt. Ähnlich wie beim Drucker für Papier, nur dass die Tintentropfen größer sind.
Im Text sind die einzelnen Tintentropfen zu erkennen
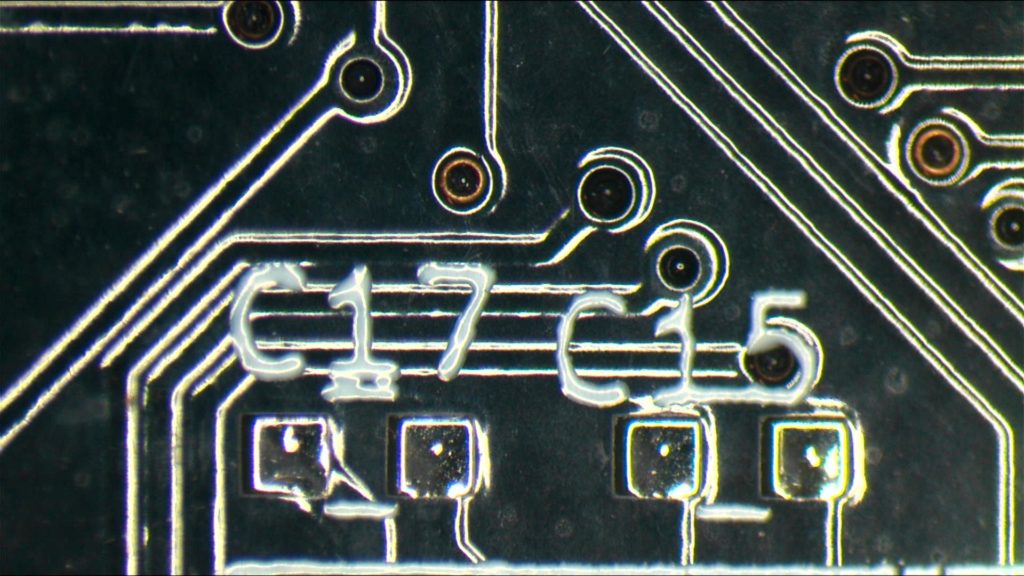
PCBWay bietet für jede Platine einen elektrischen Test an, das bedeutet, dass die einzelnen Kupferflächen und Signalleitungen gegen alle angrenzenden getestet werden. Die Spuren dieses Tests sind in den HASL (Lötzinn) Flächen gut zu erkennen. Die kleinen Punkte in den Kontaktflächen von C15 und C17 kommen von der Testnadel, die hier angesetzt wurde und die Isolierung zu allen angrenzenden Leitungen getestet haben.
Nadelabdrücke der E-Test Nadeln in den Kontaktflächen von C15 und C17
Wenn wir demnächst die richtigen Treiber-Bausteine bekommen, dann werden wir sehen, ob alles geklappt hat.
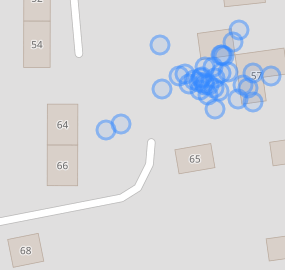
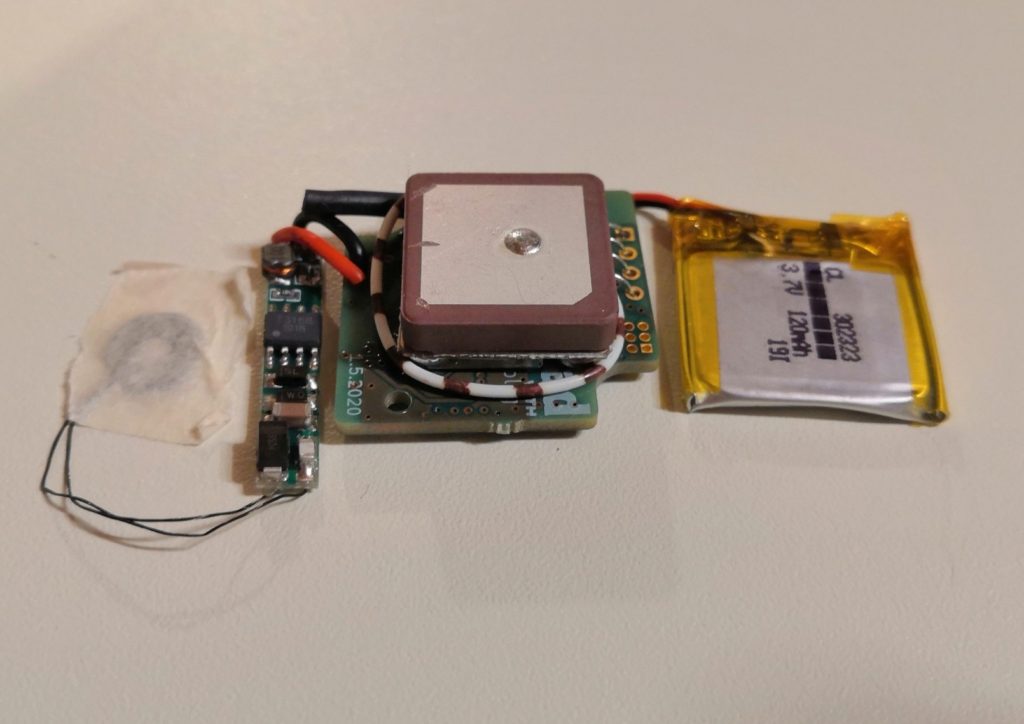
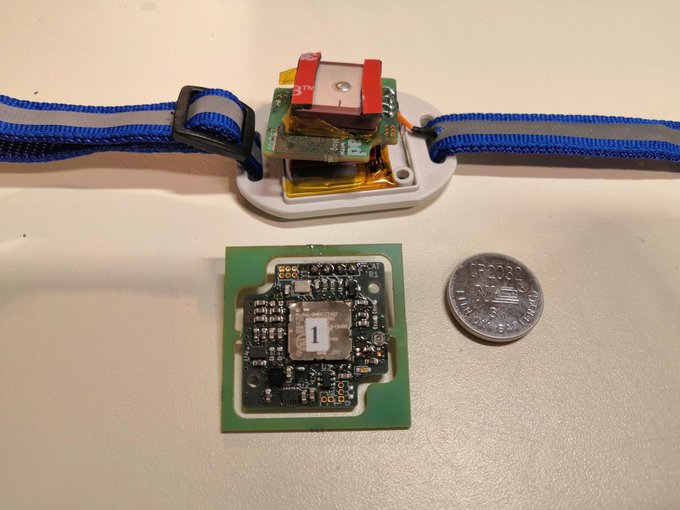
Der CATracker ist ein kleiner batteriebetriebener GPS-Tracker. Durch sein leichtes Gewicht von unter 30g eignet er sich hervorragend für das Aufzeichnen der Bewegungsmustern von Hunden und Katzen.
Der CATRacker ist ein Projekt, dass sowohl im Bereich der Hardware als auch der Software offen zur Verfügung steht. Dabei sind alle Informationen verfügbar und stehen unter diesen Lizenzen:
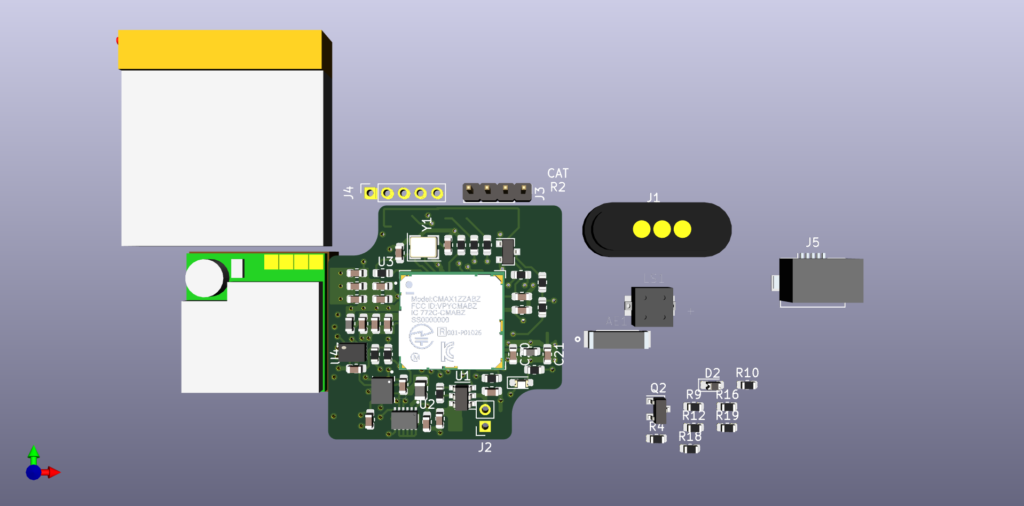
Die Bauelemente aus der Mouser Bestellliste müssen auf der Platine verlötet werden. Die hier abgelegte Infoseite zeigt, wo welches Bauteil eingelötet werden muss. Bereits gelötete Platinen sind auf Anfrage (einfach ein Kommentar hinterlassen) erhältlich.
Anschließend ist die Batterie und das GPS Modul anzulöten. Alles kommt dann in das Gehäuse und wird verschraubt. Das Halsband kann nun durch die Ösen im Gehäuse gezogen werden und der Tracker ist fertig. Das initiale Aufladen des Akkus sollte mindestens eine Stunde dauern. In dieser Zeit wird der Akku komplett geladen.
Chris hat seinen 3D-Drucker verbesser. Es fehlt nur noch die Konfiguration von Marlin.
Common Sense Tips
Basti beschreibt eine weitere Engineering Card. Einheitsbrei schmeckt Allen ein bisschen soll heißen, dass man mit vorgefertigten Modulen meistens alle Anforderungen erfüllen kann. Daher loht es sich diese Module vorzuhalten.
Der Bestückautomat
Chris hat ein Mainboard erstellt, das sollte demnächste geliefert werden. Gesponsert wurde das Board von PCBWay. Vielen Dank dafür.
Danach schweifen dei Junkies in das Thema Leiterplatten ab.
Bastis Stream auf Twitch kommt langsam in Fahrt und er hat bereits einige Abonenten.
Für Tier 1 Abonnenten (auch Amazon Prime) gibts den Lötkolben als Emote.
Wir haben eine kurze Sommerpause eingelegt, aber hier sind wir wieder.
Common Sense Tips
Chris schlägt vor, mehr auf das eigene Bauchgefühl zu hören, wenn man mit Vergleichen nicht weiter kommt.
Basti sagt, dass man es sich einfacher machen kann, wenn man Abstraktionsschichten einbringt um große, komplexe Systeme in kleinere zu zerlegen. Aber nicht übertreiben.
Der Bestückautomat
Basti durfte endlich das Innenleben des Bestückautomats erneuern. Chris wird ein Mainboard erstellen, dass dann die Steuerung für die notwendigen Funktionen übernimmt. Alle anderen sind nicht mehr im Automat vorhanden.
Chip der Woche
Basti stellt das STM32F103C8T6 Breakout board vor. Das kann man unter dem Namen Bluepill beim Händler des Vertrauens beziehen. Für etwas mehr Geld ist dann meistens auch noch einer der ST-Link V2 Debugger gleich mit dabei.
Wir werden eine neue Iteration des Pick and Place Mainboards entwickeln. Das neue wird generell einsetzbar sein, um eine Pick and Place Maschine zu steuern.
Common Sense Tips
Basti schlägt vor, mehr abzuliefern, als versprochen war. Beziehungsweise nicht zu viel versprechen und dann lieber positiv überraschen als immer nur Aufschübe zu benötigen.
Chris merkt an, dass es viele spezielle ICs gibt, die Komplexität aus einer diskreten Lösung herausnehmen. Schaut einfach ob es einen IC gibt, der das was ihr erreichen wollt bereits knn.
Chip der Woche
Chris hat den ERF32BG22 gefunden, ein Silicon Labs Gecko mit BLE und der Möglichkeit AOA (Angle of Arrival) zu dekodieren, also eine Ortung des BLE Senders vorzunehmen.
Er hat auch schon einer Idee, wozu er das einsetzen will.
Vielen Dank an alle, die uns schreiben, oder sich sonst so melden.
Einen besonderen Dank an Fabian, der uns mit einem neuen alten Bestückautomat versorgt.
Wir sprechen über Bastis neuen Twitch Kanal. Die Videos gibts auch bei Youtube.
Chris hat mit dem ESP32 und BLE experimentiert.
Common Sense Tips
Chris: If it works it’s good enough. Nicht perfekt, aber gut genug.
Basti: Show don’t tell. Versuche etwas bildlich zu zeigen, bevor du es nur beschreibst.
Chip der Woche
Basti hat den PDR06380 als Chip der Woche rausgesucht. Ein Spannungsteiler mit einer grandiosen Bandbreite von 40GHz im dreieckigen Gehäuse.
Cookie-Zustimmung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Zustimmung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Vorlieben
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.