Feedback / Neuigkeiten
Wiederholt danke an Bastian für die Mail von Bastian. Auch ein Danke an alle Hörer für 5000 Downloads in den letzten 2 Jahren.
Neuigkeiten
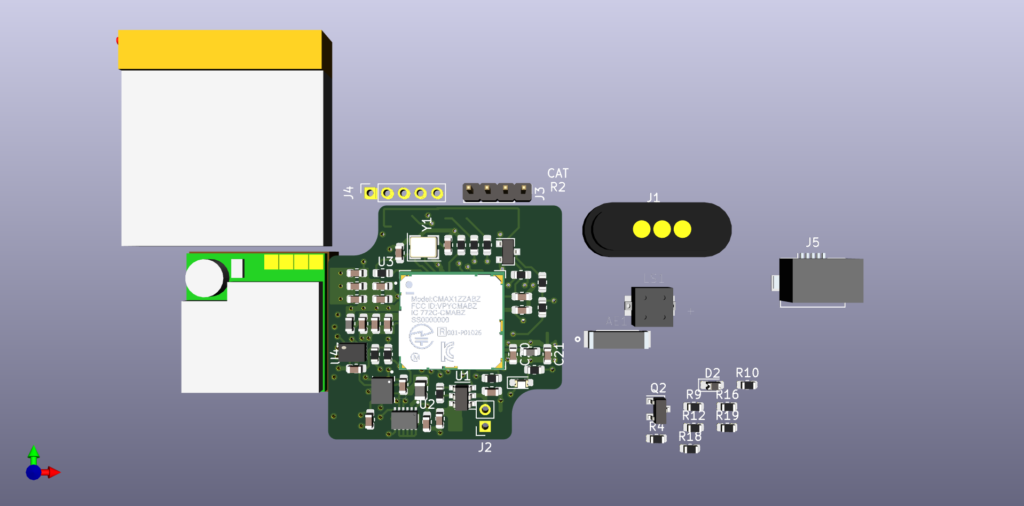
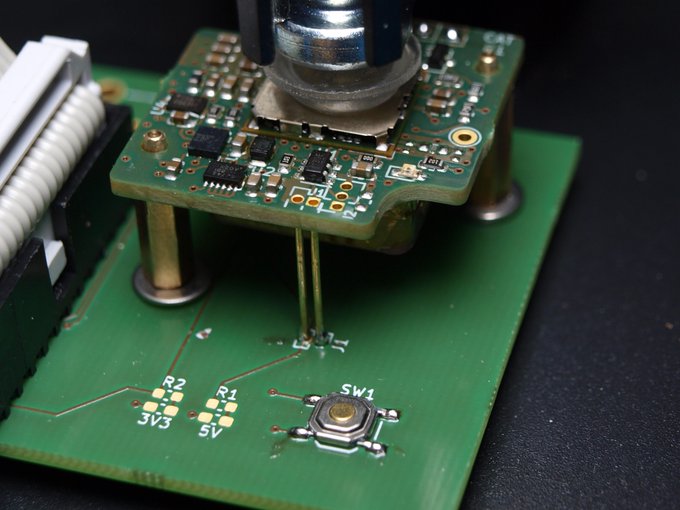
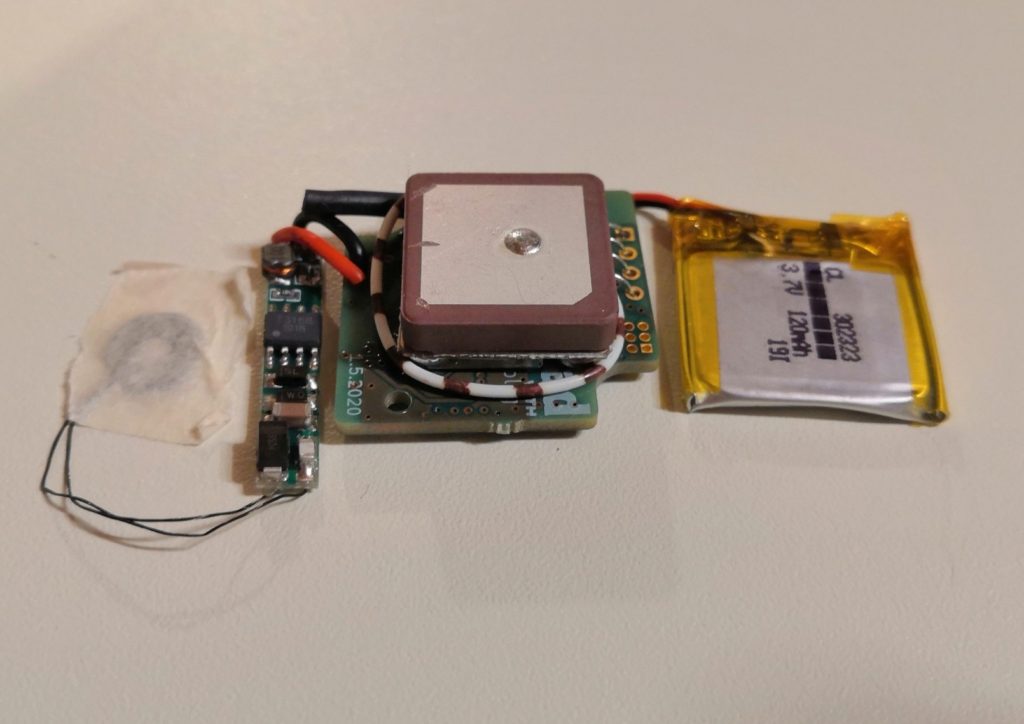
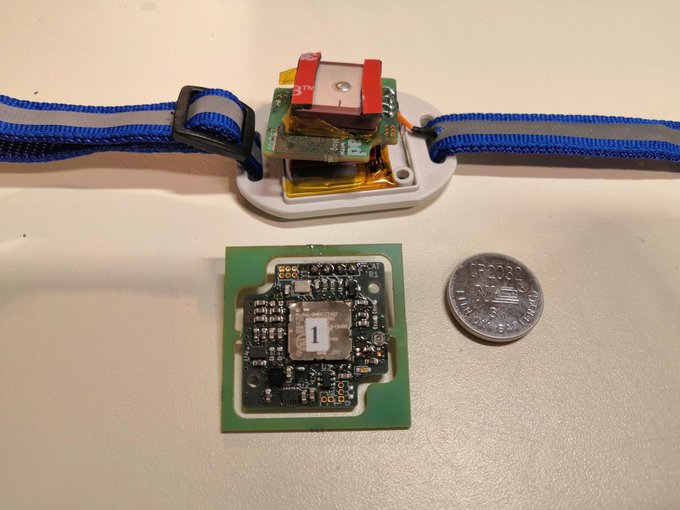
Katzentracker geht in Rev. 3 und Chris hat ein Gehäuse designt. Das Design wirde Live auf Twitch erstellt. @thebrutzler
Common Sense Tipps
Basti: Versionierung ist Pflicht.
Chris: Eigenwerbung. Folgt mir gerne auf Twitch 😉
PNP
Flachbaugruppe ist eingebaut und „funktioniert“.
Hilfe ist unterwegs. Kommt in 2-6 Monaten.
IndiaNavi
Das IndiaNavi ist/wird ein Navigationsgerät welches als Display ein 7 Farb E-Ink. verwendet. Es geht im Grunde darum, ein Navigationsgerät zu entwickeln, welches seeeeehr lange Akkulaufzeit hat.
„Chip“ der Woche
Chris nennt das 7 Farb E-Ink ACeP seven-color. Es wird kurz das Evaluationskit von Beck erwähnt und dass der Prototyp auf der Modulbasis aufgebaut wird.