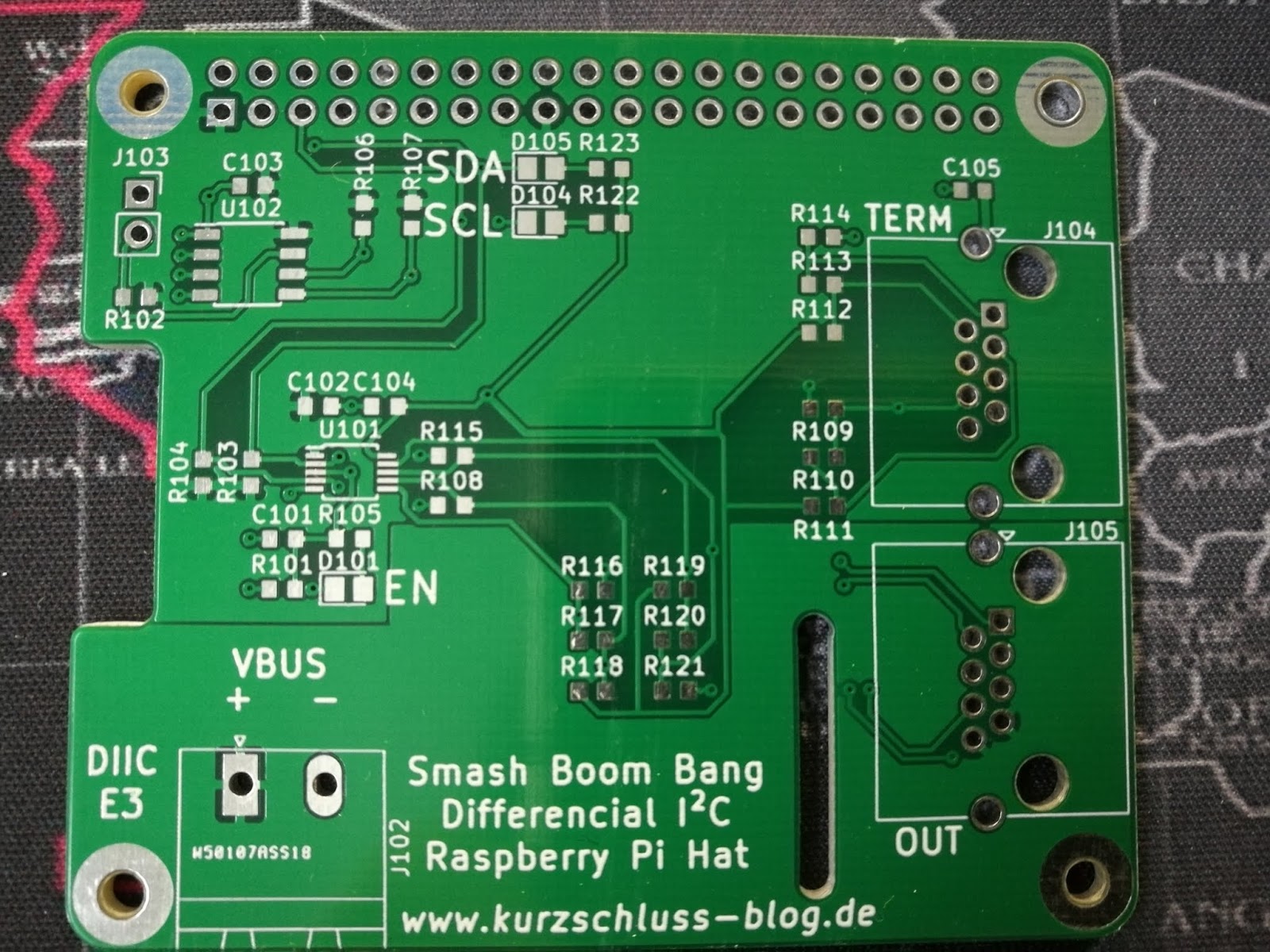
Ich habe vor einigen Tagen einen Gutschein von PCBWay bekommen. Im Gegenzug dazu veröffentliche ich auf meiner Webseite eine Rezension. Dieser Artikel ist die Rezension zu den kostenlos erhaltenen Leiterplatten. Zuerst die fertig bestückte Leiterplatte bereits auf dem RaspberryPi montiert. Wenn ihr euch über den Link anmeldet und eine Bestellung aufgebt, bekomme ich einen kleinen Bonus für weitere Platinen.
Die Leiterplatte kam in einem Fedex Paket. Als Express. Innerhalb von 5 Tagen nach Bestellung. Unglaublich schneller Service auf Seiten von PCBWay. Deutsche Leiterplatten Hersteller haben ähnliche oder längere Lieferzeit bei weit höheren Kosten.
Im Paket waren Aufkleber, ein Weihnachtsgeschenk und die Leiterplatten. Das Weihnachtsgeschenk ist ein PCB Weihnachtsmann, der über Batterie betrieben leuchtet. Die Leiterplatten sind wie üblich eingeschweißt um sie vor Korrosion und Schmutz zu schützen.
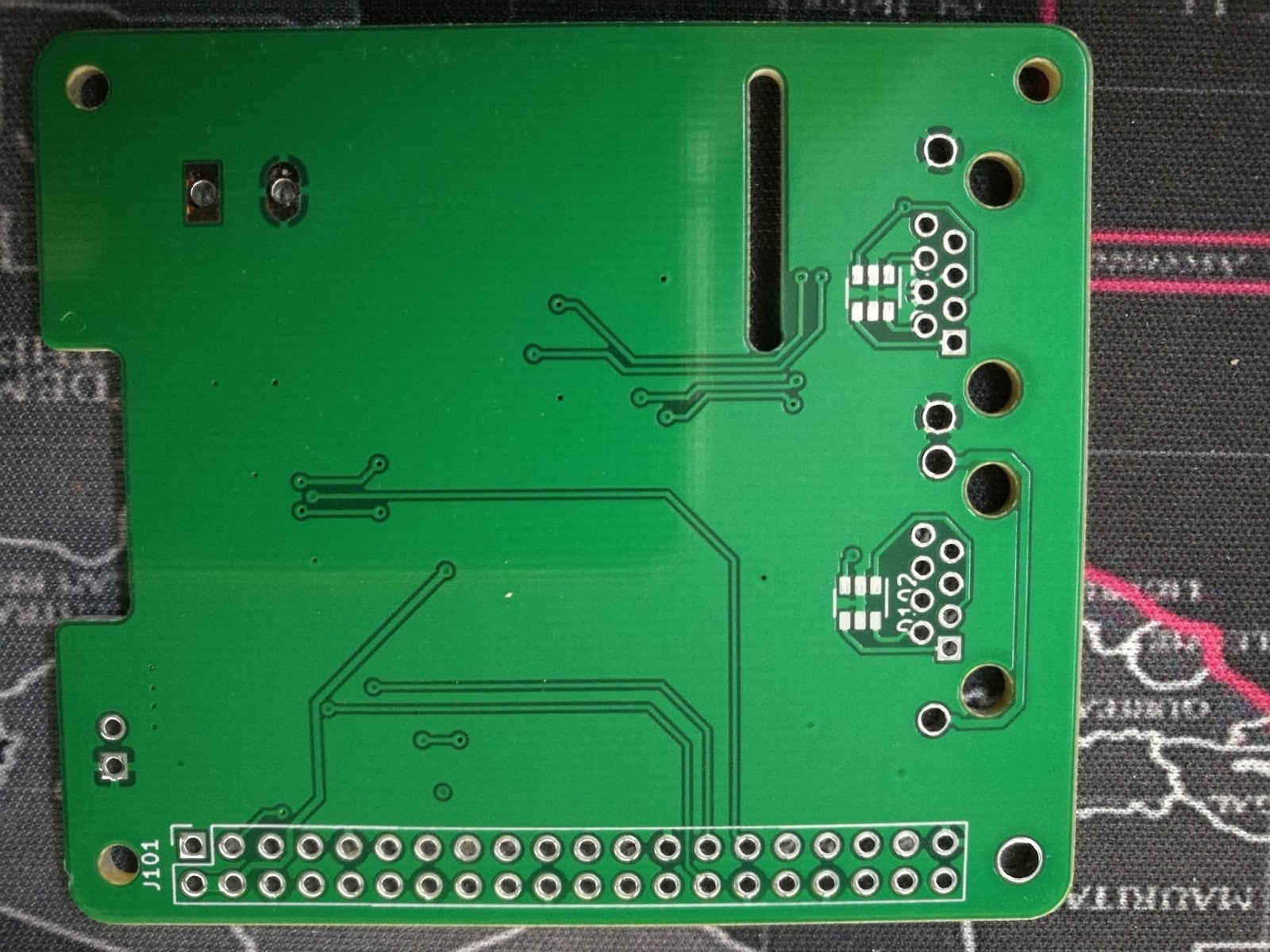
Ausgepackt zeigt sich die hervorragende Qualität der Boards. Bei der ersten Inspektion lassen sich keine Fehler erkennen. Sowohl auf der Vorder- als auch auf der Rückseite. Auch die Abmessungen der Leiterplatte ist genau getroffen, so weit ich das mit dem Messschieber nachmessen kann. Die Bilder unten zeigen die Leiterplatte von beiden Seiten. Die Fräskontur ist wie in den Gerberdaten angegeben ausgeführt. Die Kerbe an der linken Seite, sowie der Schlitz sind wie gewünscht ausgeführt.
Ich habe neben den Bildern noch Aufnahmen mit dem Mikroskop gemacht. Dabei zeigen sich weitere Qualitätsmerkmale der Leiterplatten.
Das oben gezeigte Bild ist mit einem USB Mikrokop aufgenommen und zeigt 0,25mm breite Leiterbahnen und Vias mit 0,4mm Loch und 0,4mm Restring. Sehr gut ist zu erkennen, dass die Löcher der Vias sehr genau in der Mitte des Rings liegt. Das ist ein Zeichen für hohe Genauigkeit beim Referenzieren der Panels bei der Fertigung. Rechts neben dem Bild sind die originalen CAD-Daten des fotografierten Ausschnitts. Gut zu sehen ist auch, wie genau der Siebdruck zu den Kupferstrukturen ausgerichtet ist.
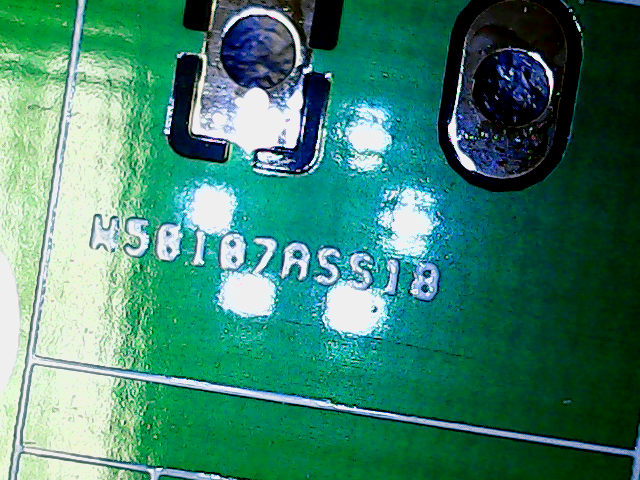
Dieser kleine Siebdruck zeigt, wie filigran PCBWay in der Lage ist Siebdruck auf die Platine zu bringen. Für Prototypen wird meistens kein Sieb hergestellt sondern mit einem Rasterverfahren gearbeitet. Dabei geht ein Druckkopf, ähnlich wie beim Tintenstrahldrucker, Zeile für Zeile die Platine entlang und positioniert tröpfchenweise Tinte, die Später entweder getrocknet, oder über UV-Licht ausgehärtet wird.
Zum Schluss noch einige Nahaufnahmen der Lötstellen. Rechts vor und links nach dem Löten sehen die Strukturen sehr gut aus. Auch mit dem Lötkolben war es sehr angenehm zu arbeiten. Die Pads sind gut verzinnt (HASL) und nehmen Lötzinn (bleihaltig und bleifrei) sehr gut an. PCBWay ist also ein Leiterplattenhersteller, den ich sehr empfehlen kann. Ich habe auch schon bestückte Leiterplatten bestellt. Die waren von der Qualität auch sehr zufrieden stellend.
Heute beschreibe ich das Knöpfchenspiel. Wie bereits im Podcast erzählt, ist das primäre Ziel das Spiel bis April fertig zu bekommen. Daher gibt es bereits einige fertige Komponenten.
Das originale Knöpfchenspiel steht meistens in Spielhallen und kann dort gegen Geldeinwurf gespielt werden. Dazu müssen die leuchtenden Knöpfe gedrückt werden. Jeder Knopfdruck gibt einen Punkt. Wenn ein nicht leuchtender Knopf gedrückt wird, wird ein Punkt abgezogen. Das sieht dann so aus:
Das von mir geplante System ist ähnlich aufgebaut. Nur dass die Spieler nicht gegenüber, sondern nebeneinander spielen und dass die Punkteanzahl an einem großen Fernseher dargestellt wird und nicht auf einer 7-Segementanzeige. Dazu wird das System in mehrere Submodule aufgeteilt.
System-Controller (Raspberry-Pi)
Bus-Interface (Differenzieller I²C Bus Treiber)
Knöpfchen-Controller (STM32F030)
Knöpfchen
LED-Band-Controller
Power Supply
System-Controller
Der Raspberry Pi übernimmt die Steuerung des Spiels und die Anzeige der Punkte am Bildschirm. Dazu wird das HDMI Interface in maximaler Auflösung (1920×1080) betrieben. Weiterhin hängt am Pi noch eine Webcam (USB) mit der die Spieler für die High-score Liste fotografiert werden. Auf dem Raspberry steckt die DIIC Baugruppe. Das Bus-Interface Board Bus-Interface
Bus-Interface
Um einen stabilen I2C Bus über alle Baugruppen zu bekommen, habe ich mich für einen Differenziellen Bustreiber entschieden. Dieser ist in der Lage die Eindraht-Signale der I2C Strecke auf zwei differenzielle Signale aufzuteilen. Diese sind wesentlich unempfindlicher gegenüber elektromagnetischer Störung. Das Bus-Interface Board besitzt die nötigen Stecker für den Knöpfchenspiel Bus, ein RJ45 Stecker, der über normale LAN-Kabel miteinander verbunden werden kann.
Knöpfchen
Das Knöpfchen ist ein 60mm durchmessender Plastik Druckknopf (Schließer), der von hinten beleuchtbar ist. Die Beleuchtung wird von einer weißen LED übernommen.
Knöpfchen Controller
Die 16 Knöpfchen sind an dem Knöpfchen-Controller angeschlossen. Der Controller ließt den Schaltzustand der Knöpfchen ein und vergleicht ihn mit den Lampen. Wenn die Lampe an war, wird der Punktestand um eins erhöht, wenn die Lampe aus war, wird der Punktestand reduziert, bis er bei 0 angekommen ist. Auf dem Knöpfchen-Controller Board ist ein DC/DC Wandler, der die 12V Bus-Spannung auf 5V herab setzt. Die 5V werden dann mit einem linear Regler auf 3,3V für den Controller heruntergesetzt. Die Knöpfchen und Lampen in den Knöpfchen können mit 12V, 5V, oder 3,3V versorgt werden. Der Controller besitzt ein I2C Slave-Interface, dass die Spielinformationen an den Spiel-Controller übertragen kann.
LED-Band-Controller
Um das Spiel von Außen attraktiver zu gestalten, habe ich vor eine LED-Leiste an der Kante anzubringen, ähnlich wie bei der oben gezeigten Variante. Dafür habe ich WS2812 LEDs als Leitungsband vorgesehen. Gesteuert werden die LEDs von einem eigenen Controller. Wahrscheinlich der Arduino Nano, den ich schon für die Bühnenkulisse verwendet habe. Den kann man über die USB -> UART Brücke auf dem Arduino vom Raspberry Pi ansprechen. Für das System werden zwei AC/DC Netzteile eingesetzt. Ein 5V und ein 12V Netzteil. Das 5V Netzteil ist für die Versorgung des Raspberry Pis und LED-Band vorgesehen. Das 12V Netzteil übernimmt die Versorgung des Bus-Systems, Knöpfchen-Controller Boards und der Knöpfchen. Beide werden über den gleichen Kaltgeräte-Stecker angeschlossen und abgesichert.
Die erste Version der Hardware hatte einige kleine Bugs. Darunter war ein Fehler in der Booster Schaltung für VCOM des E-paper Displays, Kondensatoren, die nicht spannungsfest genug waren und kein Piezo Piepser. Alles das ist in der zweiten Version der Hardware vorhanden. Mit der Bestellung habe ich eine ganze Weile gewartet, da ich erst alle Teile der Hardware, die bereits vorhanden ist und funktioniert testen wollte. Das ist jetzt geschehen und die zweite Version kann hergestellt werden.
Die alte Version der Hardware hat einige Pinbelegungen anders als die Neuere. Daher ist die Software bereits dafür ausgelegt, die richtige Header Datei einzubinden, wenn für die eine oder andere Hardware kompiliert wird.
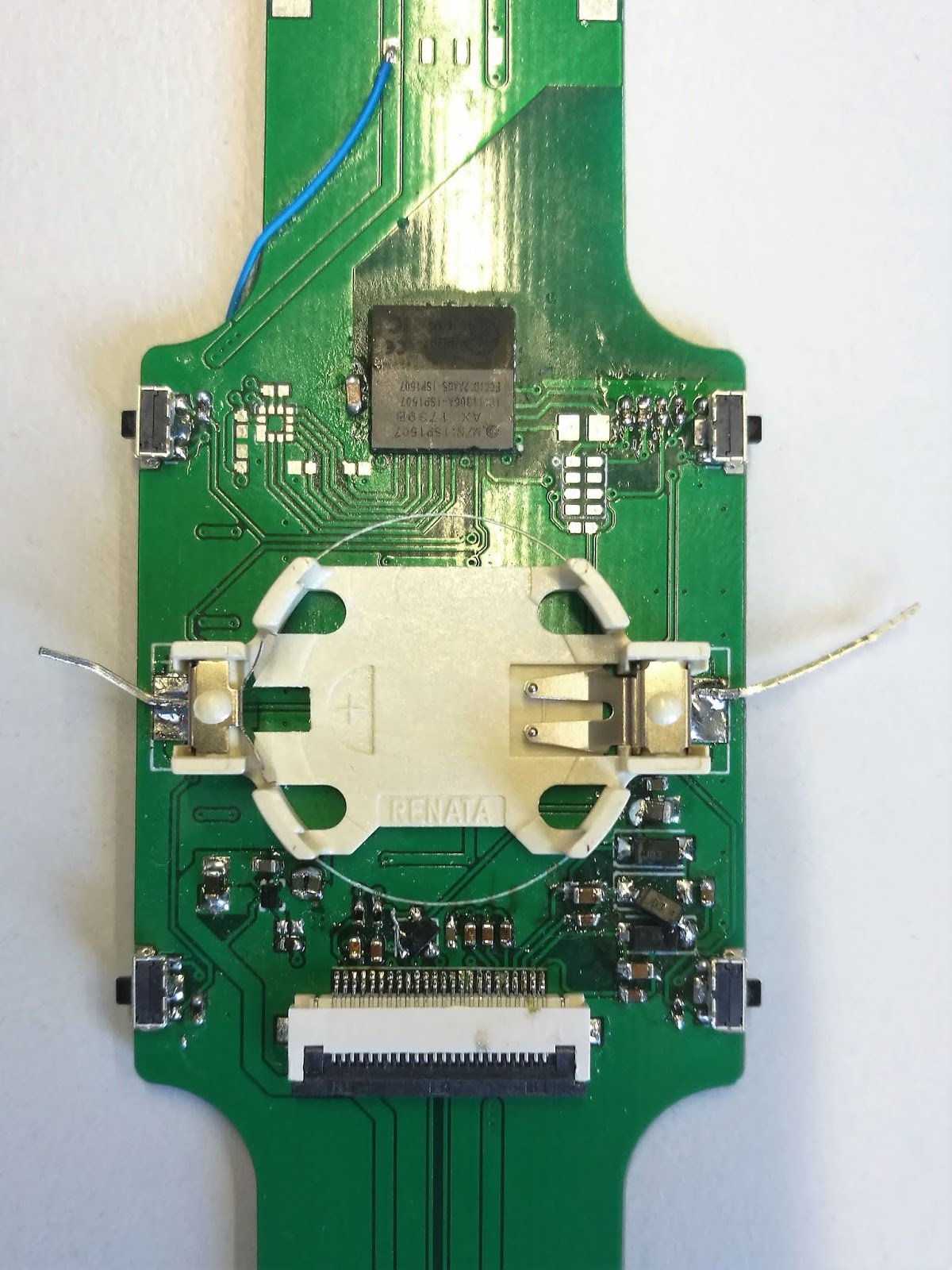
Hier eine Übersicht der aktuellen Funktionen. Links oben befindet sich der Piezo Buzzer. Um dafür Platz zu machen, ist der Bewegungssensor U4 und der Mikrocontroller U3 weiter nach rechts gewandert. Die RTC, die unabhängig vom Controller läuft, ist ein wenig weiter nach unten gewandert und sitzt jetzt rechts oberhalb der Batteriehalterung. Unterhalb der Batterie befindet sich der Teil der E-paper Ansteuerung. Im Gegensatz zur Version 1 ist hier die Schaltung mit 0603 Bauelementen ausgelegt. Daher können Kondensatoren mit höheren Spannungsfestigkeiten eingesetzt werden. Ein zusätzliches Feature ist die Beleuchtung des Displays. Dafür ist ein weiterer Flat-Flex-Stecker vorgesehen: J4.
Das PCB, das ich bestellt habe wird aus 0,4 mm dickem FR4 hergestellt und kommt damit der Dicker eines Flex-Boards mit Stiffner nahe. Eventuell ist sie auch flexibel genug um für das Handgelenk gebogen zu werden. Der Stecker sollte zwar mit einem 0,3 mm dicken Flex-Board verwendet werden, aber vielleicht passt das 0,4 mm dicke ja trotzdem.
Auch hier ist die Wahl wieder auf FR4 als Boardmaterial gefallen, da die Flex Boards alle viel teurer sind. Wenn mehr als 5-10 PCBs bestellt werden können, weil ich mir sicher bin, dass es das endgültige Design ist, dann ist Flex wieder nicht zu teuer. Bis dahin wird FR4 genügen müssen.
Einer der nächsten Schritte wird es sein, die Hardware und die Software für die Veröffentlichung vorzubereiten. Im Moment schließe ich die BOM ab, sodass eine Liste aller benötigten Bauelemente zur Verfügung steht. Weiterhin kommt dann noch ein neueres 3D Modell zum Einsatz. Auch hier sind einige Design Änderungen eingeflossen, die in der ersten Version noch nicht beachtet wurden. Dazu aber später mehr.
Hier ist das Ergebnis des Batterie Tests. Wie anhand der Oszilloskop-Bilder zu sehn war, ist die Batterie kontinuierlich beansprucht worden. Das hat sie nicht lange mit sich machen lassen und so stand heute, als ich aus dem Urlaub zurück gekommen bind, folgendes Ergebnis fest:
Die Uhr lief genau bis zum 29.09. 02:29 Uhr. Das ist nicht besonders lange. Gerade einmal 6,5 Stunden.
Das Ergebnis zeigt, dass es noch zu viele aktive Stromverbraucher gibt. Der nächste Schritt wird sein, diese zu finden und zu beseitigen.
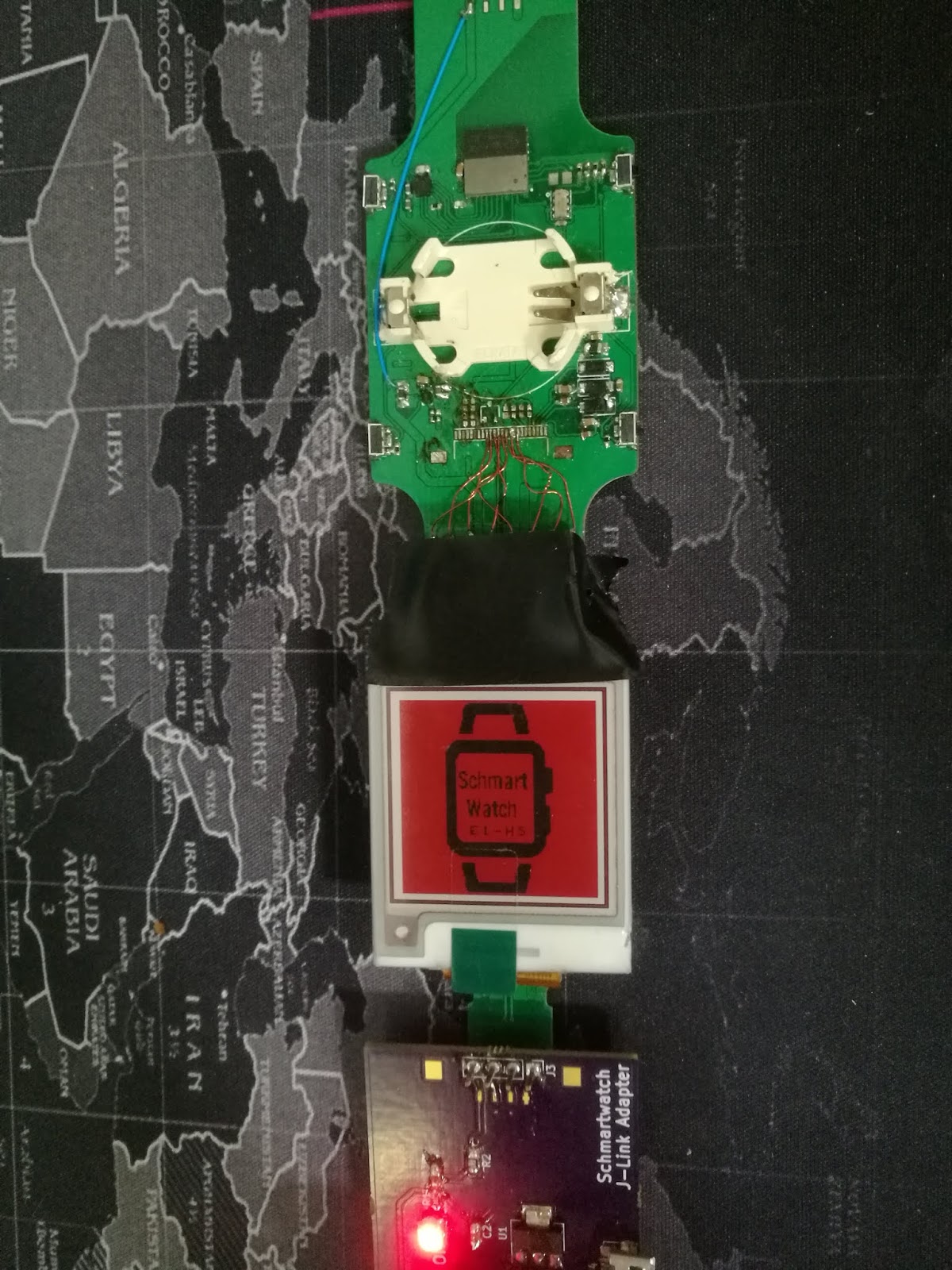
Ich habe jetzt Urlaub und was bietet sich da besser an, als ein Laufzeit Experiment. Die Uhr ist mit der aktuellen Software ausgestattet, das Softdevice ist initialisiert, aber nicht aktiv. Ich habe eine neue Batterie eingelegt und lasse die Uhr jetzt einfach liegen. Dank des E-Ink Displays kann man genau sehen, wie lange die Uhr lief, bevor kein Update mehr kam. Das Foto zeigt die Uhr kurz nach dem Start beim Updaten der Minute.
Testbedingungen
Test startete am 28.09.2018 19:56 Git Revision 0c692ed
Hardware:
FR4 Prototyp mit Display Adapter Platine
J-Link Adapter mit Diode
CR2032 Lithium Knopfzelle von EDEKA zuhause MHD: 12-2022
Zum Schluss noch einige Messungen während die Uhr läuft:
Zustand der Spule am Schaltpunkt des DCDC-Konverters während des Ruhe Betriebs. Dieser Spannungsverlauf hat eine Einschaltdauer von 15%.
Zustand der Spule am Schaltpunkt des DCDC-Konverters während einer Aktualisierung.
Spannung an der Batterie während des Ruhe Betriebs.
Spannung an der Batterie während einer Display Aktualisierung.
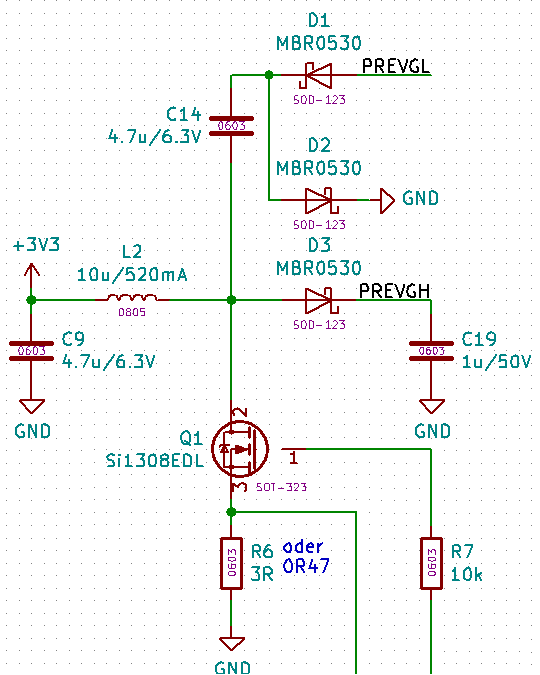
Um eine elektronische Baugruppe herstellen zu können benötigt man neben einer Leiterplatte elektronische Komponenten. Diese haben spezifische Werte, um die gewünschte Funktion zu erzielen. Spezifiziert werden die Werte beim Eingeben des Schaltplans. In KiCad geht das mit dem Programm Eeschema. Anhand der Funktion und angegebenen Parametern kann eine Auswahl getroffen werden, welche Bauteile von welchem Hersteller für eine Komponenten im Schaltplan verwendet werden können. Ähnlich wie bei der Herstellung von Leiterplatten können dann verschiedene Gründe, wie Lieferzeit und Preis, die Auswahl beeinflussen. Betrachtet man diese Schaltung, zeigt sich dass hier folgende Komponenten verwendet werden:
Zwei Widerstände, eine Spule , zwei Kondensatoren, drei Schottky Dioden und ein Transistor. Im Schaltplan sind alle wichtigen Informationen eingeblendet um die Schaltung ausreichend zu spezifizieren. Der Transistor ist angegeben als Si1308EDL. Dieser wird von der Firma Vishay hergestellt und ist nur im SOT-323 Package zu bekommen. Für die Schottky Dioden ist eine Typenbezeichnung angegeben: MBR0530. Ebenso eine Gehäuseform: SOD-123. Somit kann als Bauteil eine Diode von ON Semi oder MCC eingesetzt werden. Bei den Kondensatoren, Widerständen und Spule ist die Auswahl noch größer. Die Kondensatoren haben als Werte die Kapazität, Gehäusegröße und maximal Spannung angegeben. Mit diesen Werten bieten sich mehrere Hersteller an. Hier sind zum Beispiel Murata, Yageo oder TDK zu nennen. Jeder der Kondensatoren, der die angegebenen Werte erfüllt ist geeignet in dieser Schaltung verwendet zu werden. Die Spule ist ähnlich wie die Kondensatoren mit drei Charakteristiken spezifiziert. Der Induktivität, dem maximalen Strom und der Bauform. Mit diesen Parametern bieten sich Spulen der Hersteller Taiyo Yuden oder TDK an. Beide Spulen sind geeignet. Bei den Widerständen sind lediglich die Gehäuseform (0603) und der Ohmsche Widerstandswert angegeben. Daher bieten sich eine Vielzahl an Herstellern an, z.B. Stackpole, Bourns, Vishay, Yageo oder Susumu.
Wie zu sehen ist, stehen für viele Komponenten der Schaltung Alternativen zur Verfügung. Diese sind grundsätzlich alle geeignet um eine funktionierende Baugruppe zu bilden. Beim Herstellen kann also die günstigste oder kurzfristig beschaffbare Variante gewählt werden. Das ganze zu verwalten nennt man BOM-Management (Bill of Material). In größeren Unternehmen sind ganze Abteilungen damit beschäftigt, die Verfügbarkeit von Alternativen für die Bestückung der Leiterplatte zu sichern. Im kleinen Rahmen reicht aber eine solche Tabelle völlig aus.
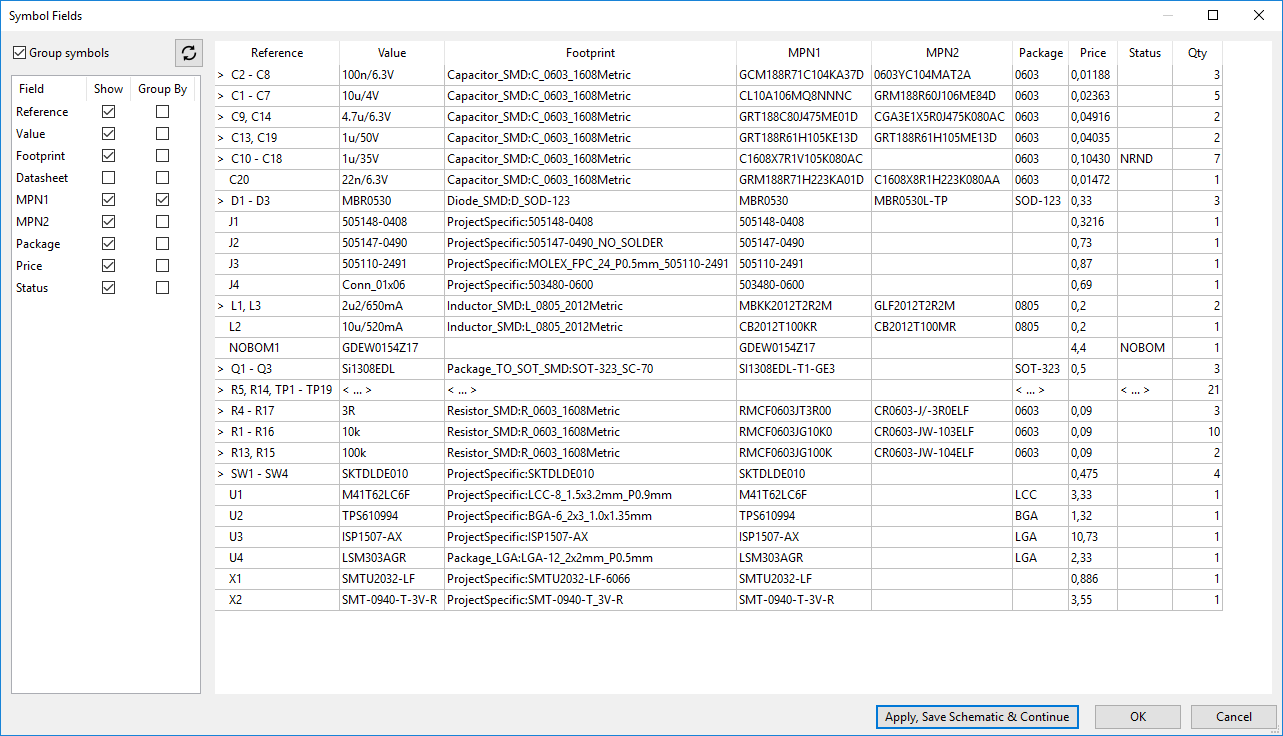
Im aktuellsten KiCad (5.0.0) ist das Management der BOM nicht ganz ausgereift, aber dennoch brauchbar. Die Tabelle wird dynamisch mit den Komponenten im Schaltplan aktualisiert und kann auch die einzelnen Gruppen als ganzes bearbeiten. So sind zum Beispiel alle Kondensatoren mit 100nF gruppiert. Wenn in der Gruppe ein Feld geädert wird, ändert sich auch jede Komponente in der Gruppe. So kann nach der Schaltplaneingabe schnell eine Zuordnung der einzelnen Komponenten zu Bestellnummern (MPN) hergestellt werden. Das Feld Price habe ich noch zusätzlich eingefügt, um einen groben Überblick über die Kosten zu behalten. Wenn in der Tabelle die Felder fehlen, kann einem beliebigen Bauteil das Feld im Eigenschaften-Dialog hinzugefügt werden. Danach sthet es allen Komponenten zur Verfügung.
Mit diesen Feldern in den Eigenschaften der einzelnen Komponenten kann eine Stückliste erzeugt werden, die viele Informationen für eine Bestellung beinhaltet. Über den BOM Ausgabedialog kann das Plugin bom_csv_grouped_by_value ausgeführt werden. Wenn das in der Auswahl nicht aufgeführt ist, aknn es über Add Plugin hinzugefügt werden. Im Ordner „C:\Program Files\KiCad\bin\scripting\plugins“ befindet sich das Script.
Weiterhin sollte in der Kommandozeile das %O durch ein %O.csv ersetzt werden, wie in der Abbildung zu sehen. Dadurch wird der erzeugten Datei die Endung .csv gegeben anstatt keiner.
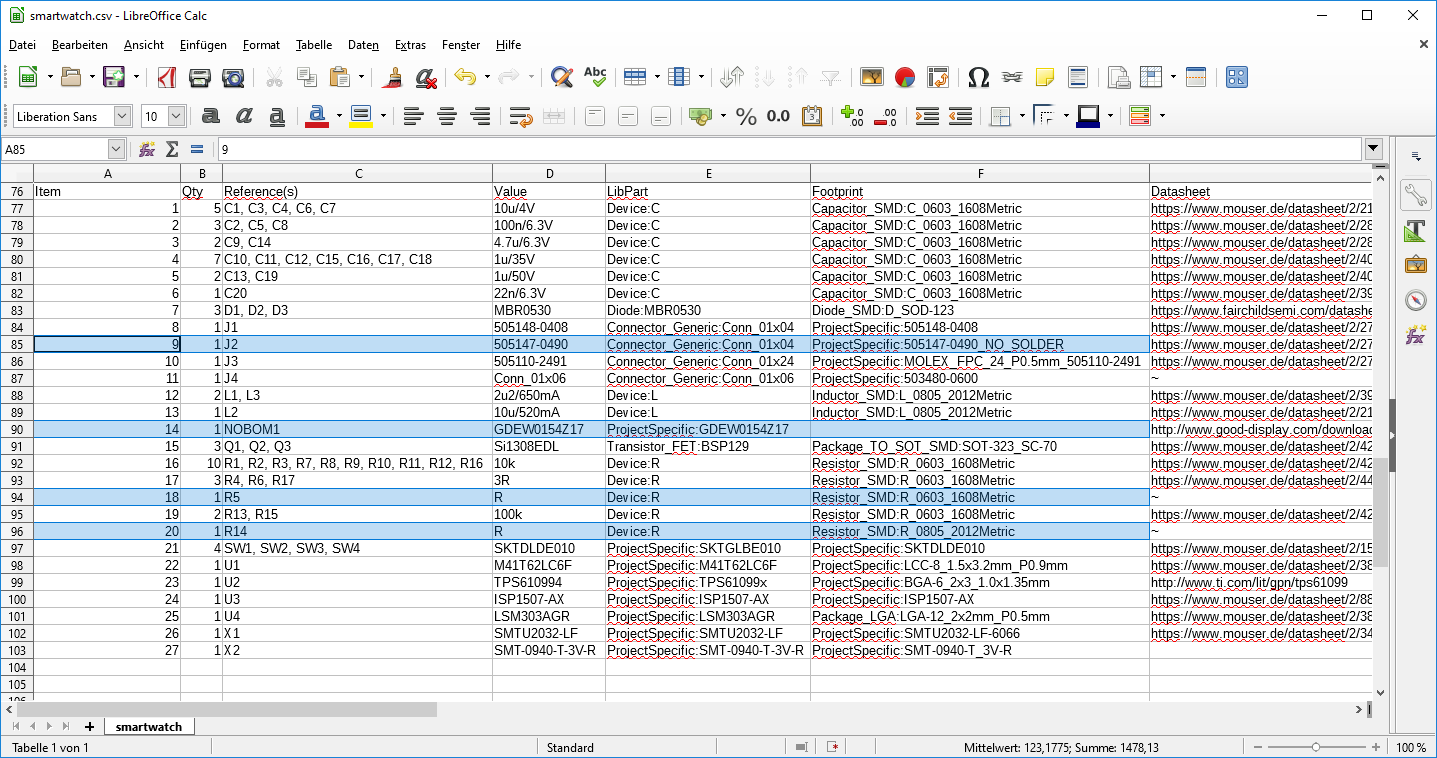
Nachdem die BOM generiert wurde, findet ihr die Ausgabe im Projektordner mit den Namen des Projekts und wenn die Kommandozeile angepasst wurde mit Endung .csv. Hier sind die Werte der Tabelle als Text abgespeichert und können in einer Tabellenkalkulation bearbeitet werden. Diese Liste kann auch dem Hersteller der Baugruppe übergeben werden. Eventuell müssen hier noch Komponenten gelöscht werden um mögliche Verwirrungen zu vermeiden.
Um Signale an der Flachbaugruppe gut messen zu können, werden Testpunkte in der Schaltung verwendet. Diese sind zwar Komponenten im Schaltplan, haben aber kein Bauteil, das bestückt werden muss. Daher kann in der Stückliste die Zeile entfernt werden. gleiches gilt für die Widerstände, die als DNP (Do Not Place) markiert sind. Auch einer der Steckverbinder soll nicht verlötet werden, daher kann er aus der Liste gestrichen werden.
Was jetzt übrig bleibt, ist eine vollständige Stückliste mit alternativen Bauteilen, wenn möglich, aus der jeder Hersteller ein Angebot für die Baugruppe erstellen kann.
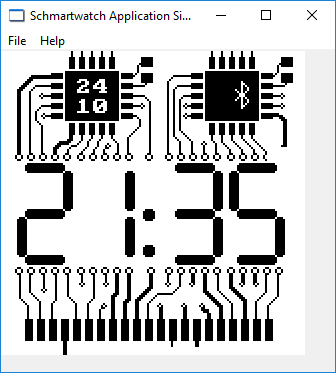
Auf meiner Pebble Smartwatch wird die aktuelle Uhrzeit mit dieser Watchface angezeigt. Die gefällt mir so gut, dass ich mich davon inspirieren ließ und für meine Schmartwatch eine 7-Segment Watchface entworfen habe.
Die Uhr ist im Moment nur in der Lage das Display komplett anzusteuern. Das heißt, es wird jede Minute das komplette Display neu gezeichnet. Der Prozess dauert einige Zeit und benötigt während der Aktualisierungsphase wesentlich mehr Strom als im Standby / Power-off Zustand. Um von der aktuell geringen Batterielaufzeit (einige Tage) auf eine bessere Laufzeit (einige Monate) zu kommen, sollte ein komplettes Update des Displays so selten wie möglich gemacht werden. Dazu mehr, wenn es um das partielle Update geht.
Die Watchface ist nach dem folgenden Muster aufgebaut:
Die RTC löst einen „Minute hat sich geändert“ Alarm aus.
Lösche den Framebuffer.
Zeichne den Hintergrund.
Schaue, ob sich der Monat geändert hat, wenn ja, aktualisiere den Bereich im Framebuffer.
Schaue, ob sich der Tag geändert hat, wenn ja, aktualisiere den Bereich im Framebuffer.
Schaue, ob sich die Stunde geändert hat, wenn ja, aktualisiere den Bereich im Framebuffer.
Schaue, ob sich der Minute geändert hat, wenn ja, aktualisiere den Bereich im Framebuffer.
Wecke das Display aus dem Energiesparmodus.
Warte, bis das Display bereit ist.
Schreibe den Framebuffer in das RAM des Displays und starte ein volles Update.
Warte, bis das Update fertig ist.
Setzte das Display in den Energiesparmodus.
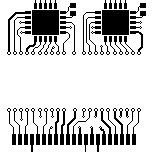
Als Hintergrund Bild ist dieses binäre Bitmap hinterlegt. Es ist 152×152 Pixel groß und nimmt somit das komplette Display ein. Bei dieser Größe hat das Bild 23.104 Pixel. Es benötigt also 2.888 Byte Programmspeicher und RAM. Der erste Schritt diesen Speicherbedarf zu kürzen ist, den großen Anteil weiß in der Mitte des Bildes auszulassen, das Bild also in zwei Teile zu zerlegen. Diese sind dann nur 45 Pixel hoch, benötigen also nur 855 Byte je Bild macht also eine Speicherersparnis von ca 30%. Bei weniger komplexen Grafiken kann es sogar effizienter sein, die Grafik bei Bedarf in den Framebuffer zu zeichnen. Genau das ist nämlich die 7-Segment Anzeige. Die Segmente sind simple Grafiken, die bei Bedarf gezeichnet, oder weggelassen werden können. Wie die Abbildung zeigt, ist ein Segment nichts weiter als ein gefülltes Rechteck, an dessen Stirnseite je eine kürzere Linie gezeichnet wird. Die Grafik wurde mit dem Simulator Tool erzeugt, der den gleichen Render-Code besitzt, wie die Uhr. Allerdings sind die Pixel um das Zweifache vergrößert dargestellt. Das hilft beim Erstellen der Grafiken enorm. Da das Display ziemlich klein ist, ist ein einzelnes Pixel schwierig zu erkennen.
Eine Zahl im Sieben-Segment Display wird dann aus waagerechten oder senkrechten Elementen gezeichnet und so müss nicht jede Zahl von 0 bis 9 als Bitmap im RAM vorgehalten werden.
Wenn man den oben beschriebenen Ablauf genauer betrachtet, kann man erkennen, dass ein partielles Update des Displays relativ einfach zu bewerkstelligen sein sollte. Jedesmal wenn sich ein Wert geändert hat, wird die betroffene Fläche mit einem partiellen Update aktualisiert. Die Dokumentation des Displays ist leider nicht sehr aussagekräftig, was den Ablauf des Updates betrifft. Daher wird dieses Thema ein eigenes Kapitel bekommen.
In den letzten Tagen habe ich mit sowohl der Firmware als auch mit der Hardware einige Fortschritte gemacht. Die Kondensatoren, die für die Ladungspumpen des E-Paper Displays zuständig sind, können die Spannung (+/- 15V) nicht vertragen. Daher habe ich die Ansteuerelektronik des Evaluationsboards mit der Leiterplatte der Uhr verbunden. Nach einigen Unklarheiten der Bitreiehnfolge im SPI Bus habe ich eine erfolgreiche Initialisierung des Displays durchgeführt. Wenn das Display mit nicht korrekt formatierten Daten beschrieben wird, bekommt man eine Pixelwüste, wie im Video zu sehen:
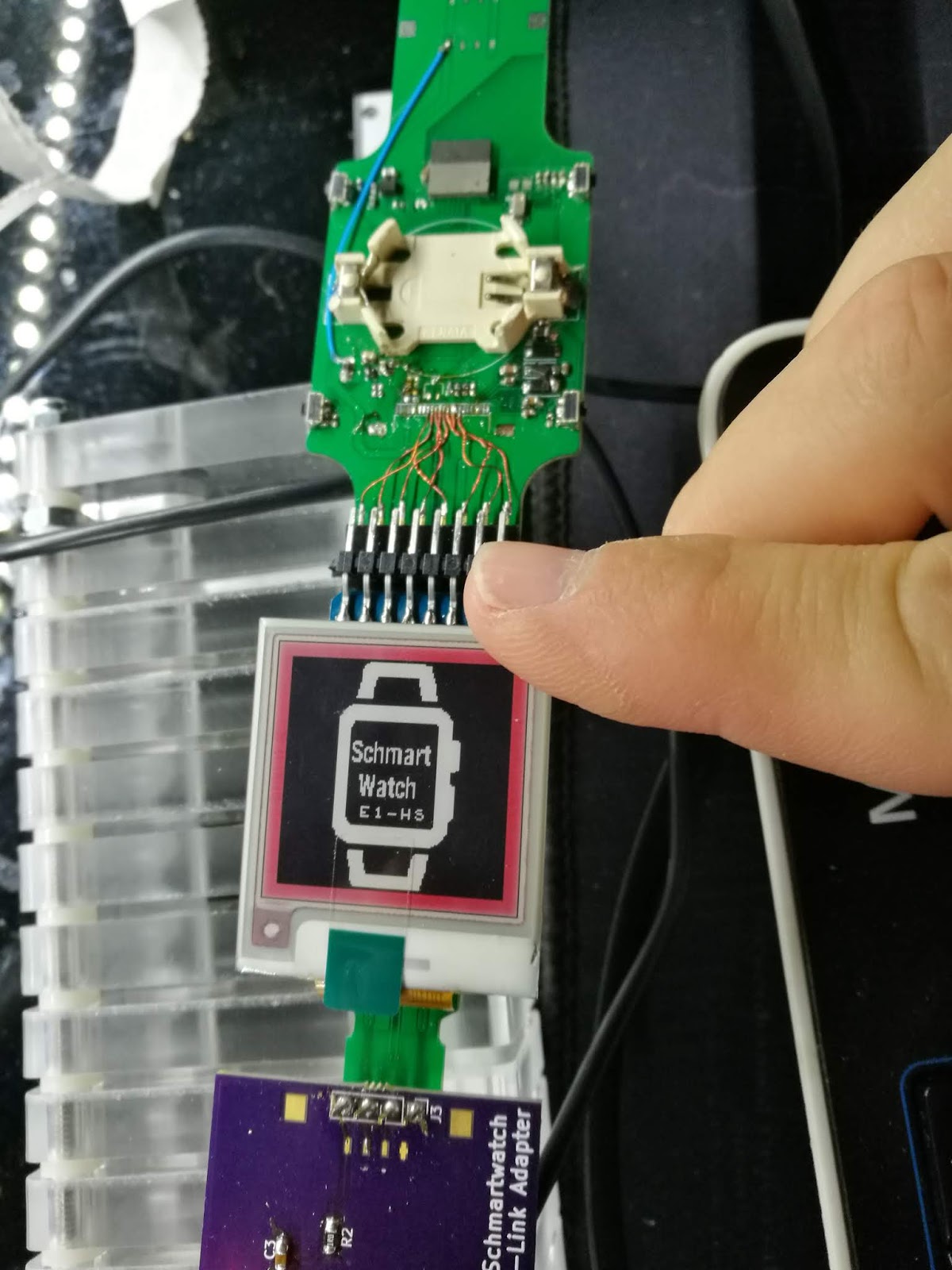
Nach dem ich mit Hilfe des Logikalaysators und Oszilloskop das SPI Protokoll so umgestellt habe, dass es mit dem des Evaluationsboards übereinstimmt, bekomme ich auch erfolgreich Daten auf dem Display dargestellt.
Die Software startet nach dem Initialisieren der Hardware einen Loop, der die Uhrzeit aus der RTC holt und darstellt. Das Display wird jede Minute aktualisiert. Im Video zu sehen ist die Aktualisierung des kompletten Bildschirms mit sehr kleiner Schrift. Daher pumpt der Treiber des e-papers auch die gesammte Fläche um. Idealerweise werden nur geänderte Flächen aktualisiert, das ist aber mit dem aktuellen Renderer nicht möglich.
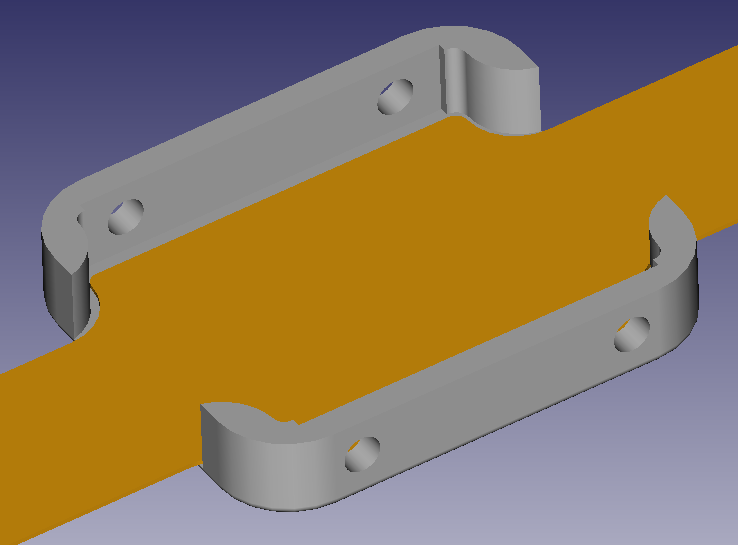
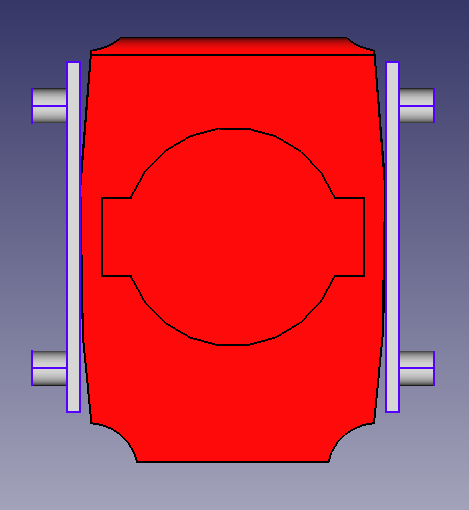
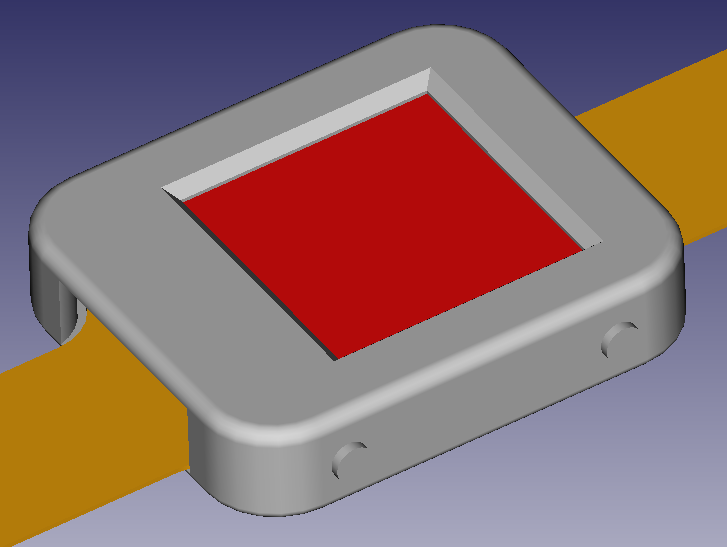
Eine anständige Armbanduhr benötigt ein anständiges Äußeres. Um mit dem DIY Stil der Uhr zu gehen, habe ich ein Gehäuse designed, das aus mehren Teilen besteht. Alle Teile sind so ausgelegt, dass sie im 3D-Druckverfahren hergestellt werden können. Gleichzeitig sollen sie aber auch aus Aluminium fräsbar sein. Die Flex-Leiterplatte wird in die Gehäusebasis eingelegt. Dazu ist die Kontur des PCBs in der Innenseite abgebildet.
In die Löcher der Basis kommen Stößel für die Druckknöpfe. Je zwei pro Seite sind auf einer gemeinsamen Querplatte und betätigen mit der Platte die Taster auf der Elektronik. Auf das PCB wird ein Kuststoffrahmen aufgesetzt. Dieser hat Aussparungen für das Display und die Batterie. Die Querplatten sind an der Kante gelagert, um eine Wippe zu bilden.
So kann immer nur die Taste hinter dem Stößel betätigt werden, egal wie feste gedrückt wird. Diese Konstruktion befindet sich also oberhalb der Elektronik und bildet damit auch die Auflagefläche für den Deckel. Wie genau ich den Deckel befestigen möchte ist mir noch nicht klar. Er ist nur 1,7mm dick, was eine Verschraubung erschwert. Die Batterie im Inneren muss wechselbar sein, daher kann ich den Deckel auch nicht verkleben. Hier brauche ich also noch eine Lösung. Ich habe schon eine Vorstellung, wie ich den Deckel mit dem Kunststoffrahmen verbinde und diesen dann von hinten mit Schrauben in der Basis-Schale halte. Wasserdicht ist die Uhr auf keinen Fall.
Wie gut sich die Modelle im 3D-Drucker herstellen lassen wird sich zeigen. Dazu brauche ich aber erst mal ein funktionierendes Board mit der wichtigsten Funktion: Anzeige der Uhrzeit.
Der Erste Schritt zur Inbetriebnahme einer Leiterplatte ist die Validierung der Stromversorgung. Die Leiterplatten sind geliefert worden und ich habe eine teilweise bestückt. Ich habe zuerst den 3,3V Boost Regler installiert. Mit einem Oszilloskop habe ich die Spannung am Ausgang des Reglers bewertet. Mit einer Last, die dem Regler 15mA konstant abverlangte, kam ich auf einen Ripple von 20mV auf der Ausgangsspannung. Dieser Ripple änderte sich nicht, egal ob die Ausgangsspannung mit nur 1mA oder mit 100mA belastet wurde. Daher habe ich als nächstes das Funkmodul bestückt. Mit dem bestückten Funkmodul war ich dann in der Lage eine Verbindung mit dem Debugger herzustellen. Als Debugger verwende ich einen JLink Pro von der Firma Segger. Nordic Semiconducters hat für diese Serie an Debuggern einen hervorragend Support.
Nachdem auch der Debugger mit dem Funkmodul in Betrieb genommen war, habe ich die restlichen Bauteile für die Ansteuerung des Displays aufgelötet. Das Display hat im Controller einige Reglerfunktionen integriert und kann sich eigene Hilfsspannungen erzeugen, dazu braucht es lediglich ein paar Kondesatoren, einen Transistor und einige SPI Befehle. Das Footprint des Transostors im Layout der Leiterplatte ist fehlerhaft, die Pins Gate und Drain sind vertauscht. Ein einfaches drehen des Transistors hat das aber wieder repariert.
Ohne angeschlossenes und konfiguriertes Display ist also die Schaltung nicht funktionsfähig. Trotzdem kann sie mit einem einfachen Toggle Signal an allen betroffenen IO-Pins auf Funktionalität und Kurzschlüsse getestet werden. Kurzschlüsse auf Pins des Displays zeichnen sich hauptsächlich durch die Verlust der Signalqualität am Display Stecker aus. Wenn also ein Output Pin des Funkmoduls, der ein High Signal liefern soll, versucht gegen ein kurzgeschlossenes Low-Signal zu treiben, wird sich die Spannung ungefähr in der Hälfte des erwarteten Wertes befinden. Nach Beseitigung der Kurzschlüsse am Displaysteckverbinder kann die Inbetriebnahme des Displays beginnen. Dazu habe ich eine Testsoftware geschrieben, die das Display startet und Werte anzeigen soll. Mit Hilfe der verfügbaren Ressourcen auf dem Funkmodul wird ein Bild erstellt, dass dem Display Pixel für Pixel übergeben wird. Danach wird gefragt, ob das Display bereit ist und wenn das der Fall ist, wird das nächste Bild übertragen.
Aktuell startet das Display die Hilfsspannungen nicht von alleine und es zeigt nichts an. Dieser Zustand benötigt viel (relativ zum normalen Betrieb) Strom, sodass das Display spürbar wärmer wird.
Wie genau sich die Ansteuerung in dieser Schaltung zu der Ansteuerung auf dem Eval-Board unterscheidet, wird sich zeigen, wenn das Evalboard den langen weg aus China zu mir gefunden hat. Bis dahin stehen noch weitere Peripherien zur Verfügung die gerne in Betrieb genommen werden möchten. Darunter fallen:
I2C Bus für Echtzeituhr
I2C Bus für Bewegungssensor
Applikationsstruktur der Firmware (nachladbare Code Teile)
BLE Softdevice
Im Moment können wir lediglich davon ausgehen, dass alle Pins des Funkmoduls korrekt gelötet und bisher keine Kurzschlüsse auf der Leiterplatte sind.
Cookie-Zustimmung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Zustimmung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Vorlieben
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.