Feedback / Neuigkeiten
Danke für die Mail von Bastian und den Wunsch, auf das Thema EMV genauer einzugehen . Passend zu Weihnachten, wenn ja auch alles leuchtet, gesagt getan.
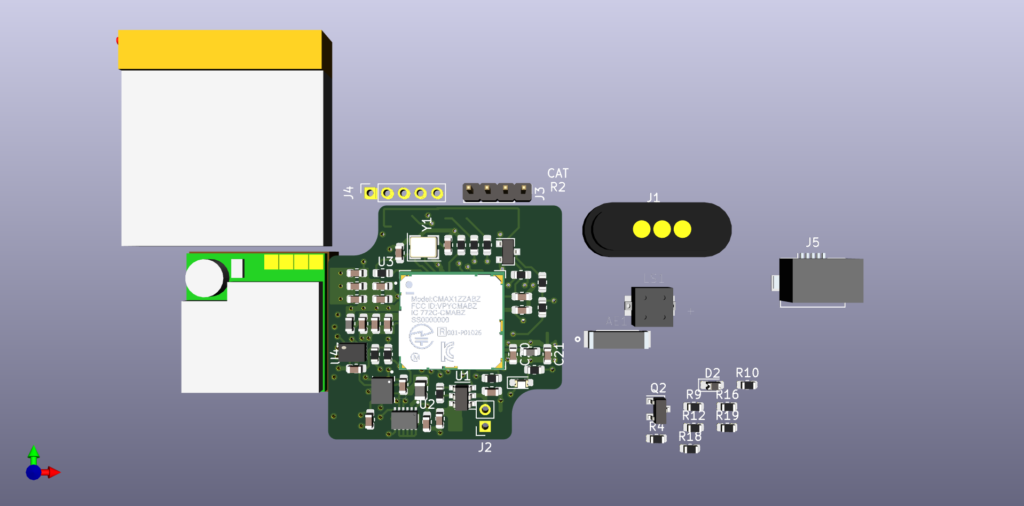
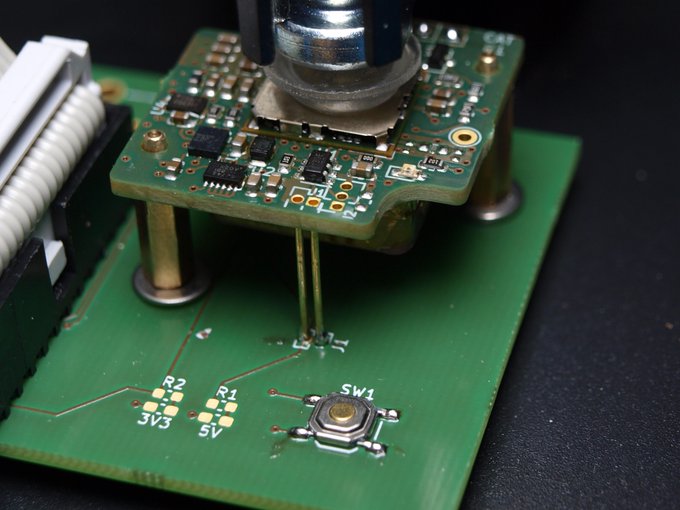
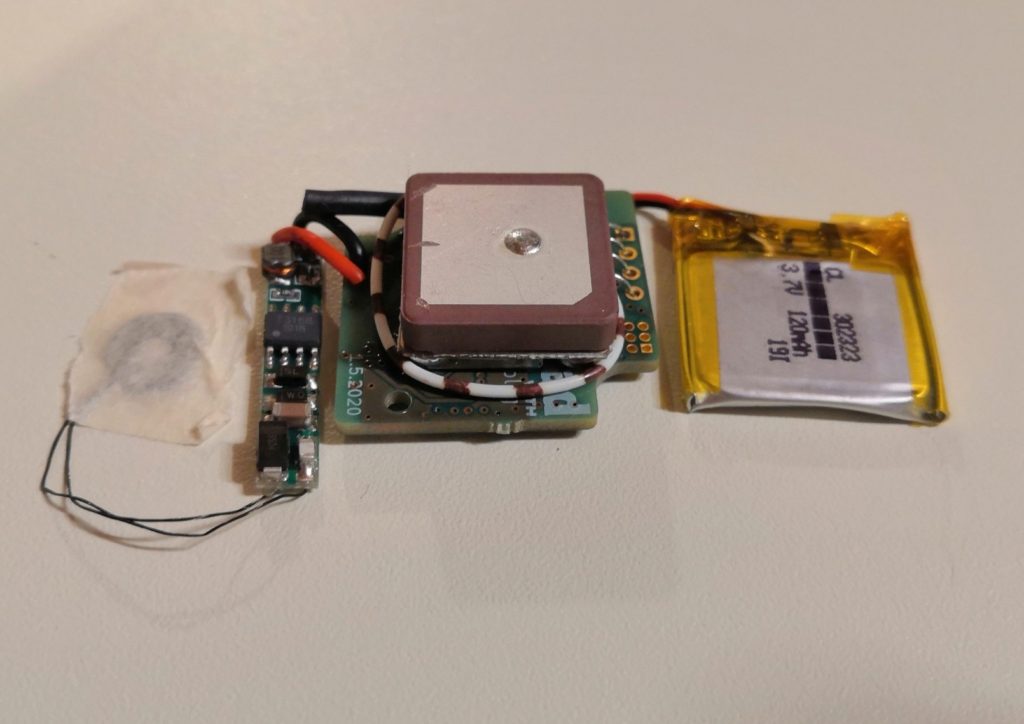
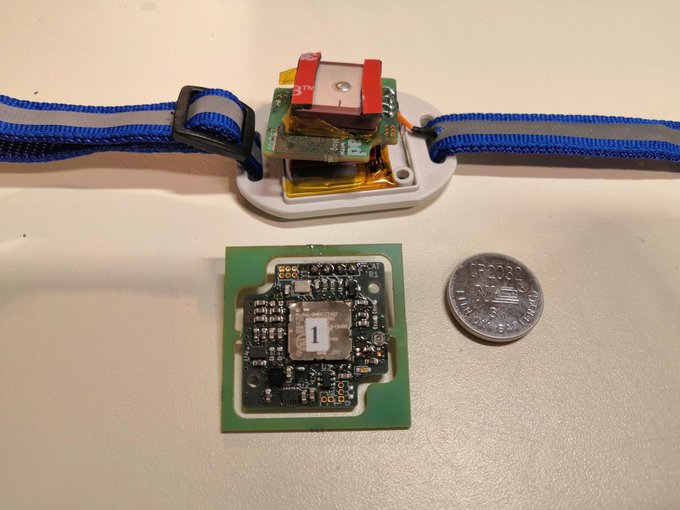
Der Katzentracker geht in Hardware Revision 3. Danke für die Samples von TEKMODUL.
Chris hat sich einen Schreibtisch für ca. 200€ gebaut.
Stücklist vom Bauhaus:
3x Sperrholzplatte 20816755 -> 34,96€
4x Rahmenholz 14416896 -> 3,20€
1x Spax-universalschraube 10013217 -> 8,18€
1x Buntlack 27262377 -> 14,57€
4x Steckdosenrahmen 12251668 -> 3,36€
16x Steckdosen 12251620 -> 4,53€
226,35 €
Kabel, Schalter und FI nach Bedarf
Common Sense Tipps
Basti: Denk an deine Zielgruppe. Wie kompliziert kannst du etwas ausdrückst ohne beim Simplifizieren wichtige Fakten zu verschleiern?
Chris: Beim Leiterplattendesign sind min. 60% Platzieren und max. 40% Routing.
EMV Elektromagnetische Verträglichkeit
Chris gibt kurz einen Überblick was alles zum Thema EMV gehört.
Es ist nicht nur die Radiowelle.
Basti gibt Tipps und Tricks um ein Robustes Design zu machen.
Beide sind sich Einig: GND bzw. Masse ist der Schlüssel.
„Chip“ der Woche
Basti nennt den EMV neutralisierenden CHI-Netzstecker dessen Wirksamkeit durch Zahlreiche positive Bewertungen auf Amazon erwiesen ist.