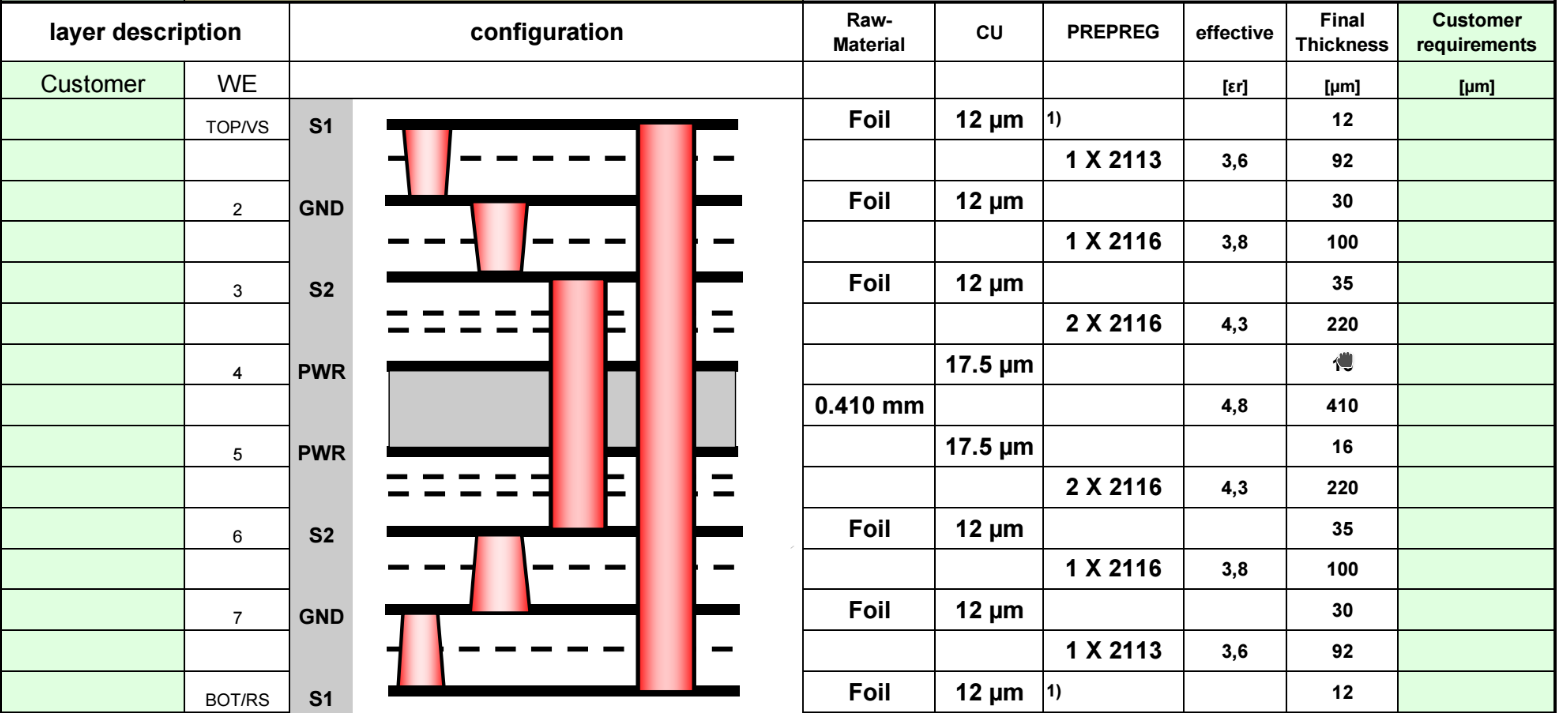
Ich bin gerade dabei ein relativ komplexes Design in KiCad zu entwicklen. Es handelt sich dabei um ein i.MX7 Prozessor mit DDR3 Anbindung. Für DDR3 sind einige Designrichtlinien einzuhalten. Diese sind neben der Leitungsimpedanz (50 Ω Transmission Line und 100 Ω Differantial Line) auch die Länge der einzelnen Signalgruppen und des Clock Signals. Darüber ein Überblick zu behalten ist nicht leicht. KiCad hat keine Funktion einfach diese Constraints zu checken und zu verwalten. Zum Glück handelt es sich um ein Open Source Projekt und daher habe ich den Versuch gestartet, pcbnew mit den nötigen Funktionen auszustatten. Ziel ist es einen angenehmen Routing-Vorgang solcher komplexen Schaltungen zu erhalten. Dazu gehören neben der Verwaltung der Constraints auch noch andere Features:
- Live Tracking der Leitungslängen
- Reporting der Constraints
- DRC der Constraints
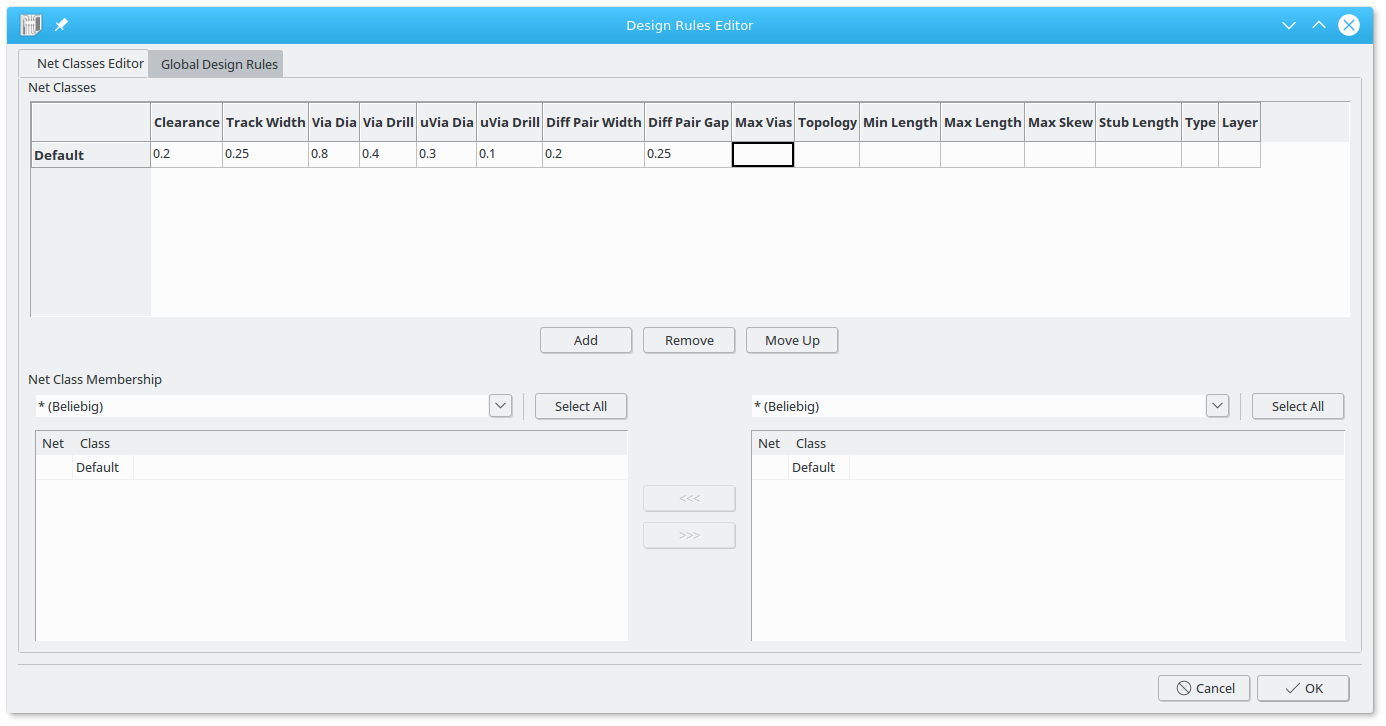
Der erste Schritt wird sein die Constraint Daten in die Netzklasse mit einzubinden. Dazu habe ich den Design Rule Dialog erweitert. Er hat 8 neue Spalten erhalten.
- Max Vias
- Topology
- Min Length
- Max Length
- Max Skew
- Stub Length
- Type
- Layer
Max Vias
Ein hochfrequentes Signal wird an jedem Materialeigenschaften-Übergang reflektiert und verliert Energie. Das können beispielsweise Änderungen des Leitungsquerschnitts, Bezugsmasse, Leitungsmaterials, oder anderer Umgebungsparameter sein. Eine Signalübergabe über ein Via in eine andere Lage ist genau so ein Übergang und führt zu Signalfehlern. Daher gibt es für manche Signale eine maximale Anzahl von Vias.
Topology
Die Routing Topologie ist die Art und Weise, wie das Signal von der Quelle zu einer Senke, oder mehrerer Senken übertragen wird. Es werden folgende Topologien erkannt:
- STAR
Das Signal geht von der Quelle sternförmig zu jeder Senke mit einer eigenen Leitung.
- T
Das Signal teilt sich (auch mehrmals) in jeweils zwei gleichlange Äste auf.
- FLYBY
Hier wird das Signal von der Quelle aus an jeder Senke vorbei geführt, ohne sich aufzuteilen. Alle Zwischenstücke sind gleichlang ausgelegt.
- HORIZONTAL
Alle Signale sollen horizontal geführt werden.
- VERTICAL
Alle Signale sollen vertikal geführt werden.
- SIMPLE_DAISY_CHAIN
Das Signal geht von der Quelle zur ersten Senke, von dort zur zweiten und so weiter. Vergleichbar mit der FLYBY Topologie.
- MIDDRIVEN_DAISY_CHAIN
Bei dieser Topologie geht das Signal von der Quelle nach beiden Seiten an mindestens zwei Senken. Dies ist eine Kombination aus eine Ebene T und FLYBY.
- MULTIPOINT_TOPOLOGY
Das Signal wird an vielen Stellen verbunden. (Niederfrequente Signale oder Spannung/Ground)
Min/Max Length
Signale, die laufzeitbegrenzt sind, oder in Relation mit anderen Signalen stehen, müssen eine gewisse Länge einhalten. Diese beiden Werte geben das Längenfenster an, in dem sich alle Signale der Netzklasse befinden dürfen.
Max Skew
Ähnlich wie die Min/Max Länge ist der Skew eine Toleranzangabe für die Länge aller Signale der Netzklasse. Beispielsweise muss ein Bus mit 8 Signalen maximal nur 60mm lang sein. Die 8 Signale sind aber auf einem Skew von 2mm begrenzt. So kann die Gruppe an sich in der Länge variieren, die einzelnen Signale sind aber strikter reglementiert.
Stub Length
Ein Stub ist eine Abzweigung des Signals. Am Ende der Leitung wird das Signal reflektiert und zurück geworfen. Das kann bei zu langen Stubs zu Problemen führen. Daher werden für diese Fälle maximale Stublängen angegeben.
Type
Hier kann zwischen den Leitungstypen Signal, Power oder Mixed gewählt werden. Diese werden an den globalen Layer Einstellungen gemessen.
Layer
Der Type Wert kann manuell überschrieben werden um die Lage in der die Leitung geführt werden darf weiter zu beschränken, oder weiter aufzulösen. Manchmal dürfen Signale nicht auf die andere Seite der Leiterkarte übertragen werden. Das kann mit dieser Einstellung konfiguriert werden.
Der aktuelle Stand ist, dass die Werte in die Tabelle eingetragen werden und mit dem Projekt abgespeichert werden können. Ich erweitere gerade die Tabelle dahin, dass die Werte schöner angezeigt werden und es für die Topologie, und Type Felder eine Dropdown-Liste gibt. Das Layer Feld soll eine Auswahlliste bekommen, in der die erlaubten Layer markiert werden können.
Live Tracking der Leitungslängen
Ein weiteres großen Feature soll das messen der Leitungslänge in Echtzeit sein. Dazu gehören mehrere Elemente. Einerseits soll auf der rechten Seite des Fensters zwischen Zeichenfeld und Toolbar eine Liste mit den zu messenden Leitungen eingeblendet werden können. Das soll ebenso wie der Layer-Dialog entweder fest am Fenster verankert, oder frei beweglich im Fenster verschoben werden können.
Andererseits soll ein weiteres Element eine Statusbar-Anzeige sein, die in Echtzeit zeigt, ob die Leitung zu lang oder zu kurz ist. Idealerweise kann hier schon eine Prognose eingebaut werden, die versucht zu ermitteln, ob mit der Länge das Ziel überhaupt erreicht werden kann. Hier werde ich am Anfang auf die „Luftlinie“ zurückgreifen und den direkten Weg als Grenze nehmen.
Reporting der Constraints
Dieses Feature ist relativ einfach zu realisieren. Alle Netze mit Constraints in der Netzklasse werden in einem Report ausgegeben und stehen als Textdatei zur Verfügung.
DRC der Constraints
Der Design Rule Check soll um die Constraints erweitert werden und mit den Fehlerklassen Report, Warning, Error über die Constraints berichten.