Wer einmal den Film Soylent Green gesehen hat wird die dystopische Zukunft die in den 70ern gesehen wurde teilweise wieder erkennen. Nicht, dass es uns schon so geht, aber die exzessive Nutzung von nicht regenerierbaren Ressourcen ist immer noch ein Problem. In unserem, zumindest meinem, Alltag ist das Essen in zwei Situationen aufgeteilt. Die schnelle Nahrungsaufnahme zur Befriedigung des Hungers während man eigentlich andere Dinge tut und zu einem sozialen Ereignis, bei dem das Essen und teilweise dessen Zubereitung mit anderen Menschen im Vordergrund steht.
Wer einmal den Film Soylent Green gesehen hat wird die dystopische Zukunft die in den 70ern gesehen wurde teilweise wieder erkennen. Nicht, dass es uns schon so geht, aber die exzessive Nutzung von nicht regenerierbaren Ressourcen ist immer noch ein Problem. In unserem, zumindest meinem, Alltag ist das Essen in zwei Situationen aufgeteilt. Die schnelle Nahrungsaufnahme zur Befriedigung des Hungers während man eigentlich andere Dinge tut und zu einem sozialen Ereignis, bei dem das Essen und teilweise dessen Zubereitung mit anderen Menschen im Vordergrund steht.
Es gibt mittlerweile einige Firmen, die sich mit der Erzeugung von pulverisierten Nahrungsmitteln beschäftigen. Ich muss hier wirklich eine Differenzierung machen, denn ein Pulver, dass mit Wasser zu einer nährstoffhaltigen Pampe verrührt wird ist definitiv kein Essen, sondern Nahrung.
Heute kam ein Paket der Firma Queal an. Darin befinden sich acht Beutel mit jeweils einem Tagesbedarf an Nährwerten. Dazu noch ein Fläschchen mit Öl, dass zusätzlich zu dem Pulver und Wasser zu einer Mahlzeit verrührt werden soll. Zu den acht Kunststoffbeuteln gab es noch zwei Sticker und eine Kurzanleitung in der steht, wie ein Queal Meal zubereitet werden soll. Beim Auspacken zeigt sich auch schon warum der Titel Soylent Yellow heißt. Egal welche Geschmacksrichtung für die Pulver angegeben ist, das Pulver ist gelb.
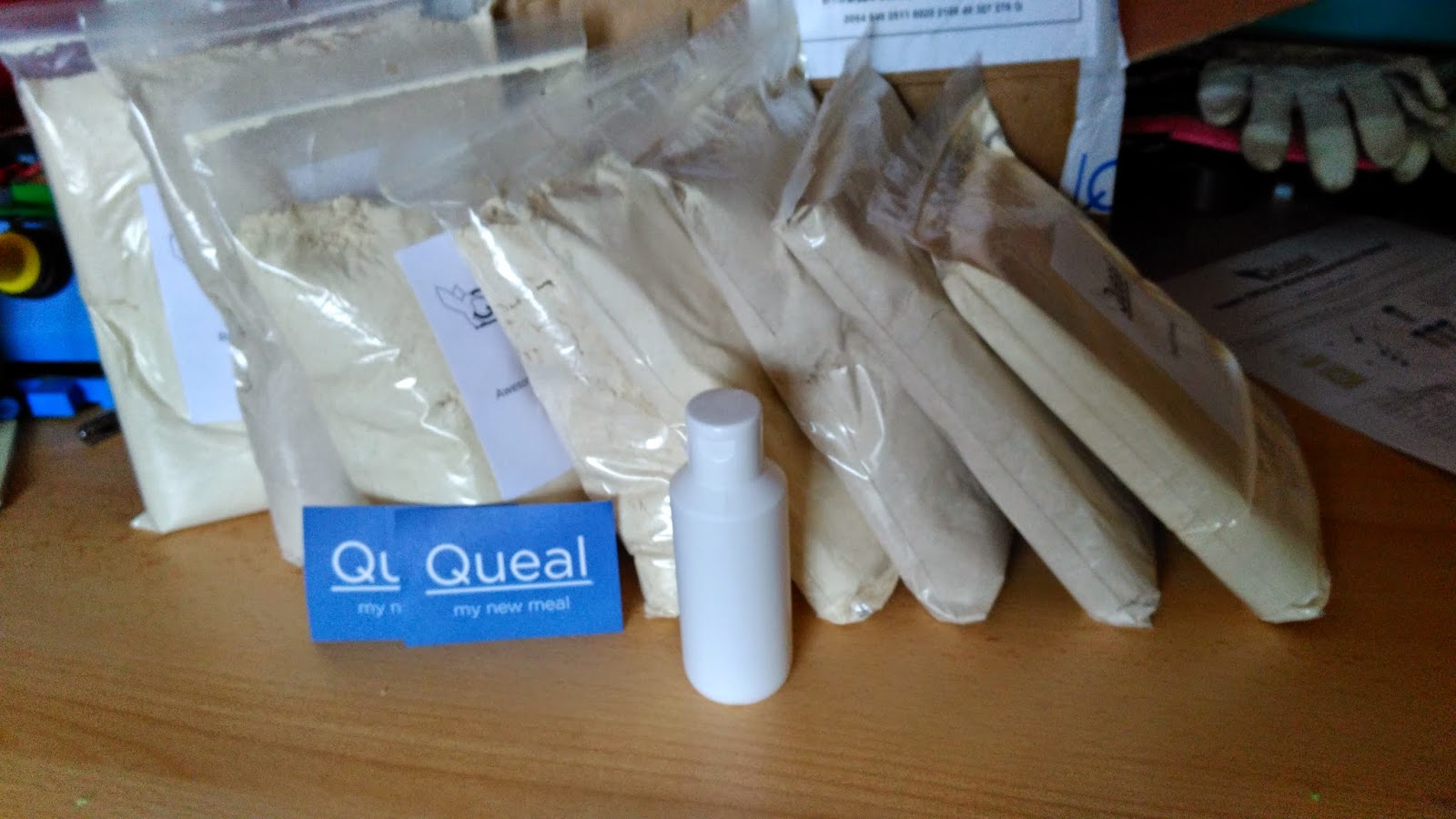 |
| Queal Geschmackstester Set mit allen Geschmacksrichtungen |
Donnerstag 19.03.
Was bei dem Starterkit meines Erachtens fehlt ist der auf der Webseite abgebildete Shake-Becher, immerhin handelt es sich um ein Set um mal zu probieren. (Mittlerweile gibt es zu jeder Bestellung einen Becher dazu.) Andererseits mache ich die Mischung sowieso in meinem Mixer. Zum Frühstück gab es heute die Geschmacksrichtung ‚Awesome Apple Pie‘. Wenn mein Apfelkuchen so schmecken würde, wäre er direkt im Müll. Der Geschmack ist pulverig bis mehlig und alles andere als Apfelkuchen. Trotzdem muss ich sagen, dass mir der Geschmack eigentlich egal ist, denn wenn ich ehrlich bin: Wenn ich etwas wegen des Geschmacks essen möchte, dann koche ich mir einfach was. Wenn es allerdings schnell gehen soll, dann kann es auch ruhig mal Pampe sein, die ein wenig nach süß und Mehl schmeckt. Hauptsache es dauert nicht länger als ein Brot zu belegen und ist nahrhafter als ein Glas Wasser.
Die Portionierung der Beutel ist drei Portionen für ein Tag. Ich hätte auch kein Problem damit etwas mehr zu bezahlen, wenn ich dafür Portionsweise abgepackte Einheiten bekomme. Das Problem ist nämlich, dass ich nicht unbedingt einen Beutel am Tag benötige und daher ich die Portion abwiegen muss. All das führt dazu, das die Zubereitung wieder länger wird als alles einfach in den Mixbecher zu schütten. Eventuell werde ich mir einige Dosen vorbereiten, in denen dann immer eine Portion abgewogen ist einfach um sie schnell griffbereit zu haben. Das widerspricht dann leider wieder der Philosophie von schnell als Alternative zu echtem Essen.
Freitag 20.03.
Die zweite Geschmacksrichtung, die ich probiert habe ist ‚Crunchy Choco Cookie‘ das war schon besser als die erste Runde. Der Shake macht zum Frühstück angenehm satt. Das Gefühl hält eine sehr lange Zeit an und ich bin gespannt ob ich es mal schaffe einen kompletten Tag mit Shakes zu füllen und ob eine Tüte ausreichend ist für einen Tag. Zum Abend habe ich einen zweiten Shake getrunken. Diesmal bin ich von ‚Cool Chocolate‘ wirklich positiv überrascht. Der Geschmack ist leicht schokoladig und ich habe die Konsistenz perfekt hinbekommen. Das bedeutet 175g Queal, 1 Teelöffen Öl und etwa 500 ml Wasser im Mixer für 2×30 Sekunden. Dadurch erhält man ein relativ flüssiges aber dadurch nicht zu pulveriges Getränk. Morgen werde ich ausprobieren, wie der Shake sich auch als Müsli-Ersatz macht.
Kleine Anmerkung zum Thema Nährwert: Ich habe eine Portion Shake circa zwei Stunden vor dem Sport getrunken. Mein Magen war nicht zu voll und ich war Energiegeladen. Allerdings habe ich gemerkt, dass ich nach ungefähr einer Stunde Workout ein wenig mehr Power hatte als sonst. Typischer Fall von Unterzuckerung, die ich schon öfter hatte, wenn ich nicht ausreichend gegessen habe. Montag werde ich noch einmal sehen, wie viel Energie mir so ein Shake geben kann.
Montag 23.03.
Am Wochenende gibt es gemeinsames Essen und so hat der Essensersatz keinen Platz gehabt. Heute gab es Queal dann gleich zwei mal. Einmal zum Frühstück. Dann noch einmal zu Abend. Montags bin ich 1,5 Stunden im Training, esse dann zu Abend und habe anschließend noch 2 Stunden Training. Als Geschmacksrichtung gab es ‚Crazy Chocolate Peanut‘ komplett ohne Erdnüsse. Interessanterweise schmeckt der Shake ganz genau so, wie ich Reese’s Peant Butter Cups in Erinnerung habe. Da stellt sich die Frage, wie viel Erdnussgeschmack ist in den Butter Cups?
Der Shake ist nach 1 Stunde immer noch deutlich im Magen zu spüren, allerdings fällt die Bewegung wesentlich leichter als mit beispielsweise einem Käsebrot im Bauch. Genügend Energie bringt der Shake auch mit, sodass nach den drei Stunden Training noch genügend Energie da war um nicht direkt einzuschlafen.
Dienstag 24.03.
Zum Frühstück gab es einen Shake und zu Mittag den nächsten. Langsam gewöhnt sich meine Verdauung auch daran flüssige Nahrung zu erhalten. Ich bin immer noch gespannt, wie ein ganzer Tag mit Queal aussieht und ob das Hungergefühl aus bleibt. Gefühlt ist noch jede Menge Pulver da und ich habe so langsam den Dreh raus, das Pulver aus dem Beutel in den Mixbehälter zu transferieren, ohne absolutes Chaos in der Küche zu fabrizieren.
Mittwoch 25.03.
Ich habe jetzt bald alle Sorten einmal durchprobiert. Doch bis jetzt war keine dabei, die mich wirklich überrascht hat. Es schmeckt alles irgendwie süß und nach Geschmacksstoffen. Trotzdem ist es eine Alternative zu Fastfood. Ich habe diese Woche immer zwei Mahlzeiten mit Queal ersetzt und eine mit echtem Essen. Diese Konstellation ist für mich gut machbar.
Donnerstag 26.03.
Eine Woche habe ich jetzt Queal als Nährstoffquelle verwendet und ich bin überrascht zu sagen, ich kann es mir durchaus vorstellen, weiter zu machen. Die Testpackung ist ungefähr halb leer und ich überlege, welche Sorten ich als nächstes in größeren Mengen bestelle. Allerdings muss ich vorher das mit dem korrekten Portionieren hinbekommen, denn die Küchenwaage ist leider nicht die Beste (Das Display ist fast unmöglich zu lesen) und die drei Portionen pro Beutel sind auch nicht gerade ideal.
Fazit
Ein Soylent als Alternative zu echtem Essen? Unvorstellbar. Als Alternative in Situationen, in denen der Genuss nicht im Vordergrund steht, sondern der Hunger möglichst schnell gestillt werden soll ist es allerdings eine sehr sinnvolle Alternative. Vor allem zu dem Preis. Also: Ausprobieren!