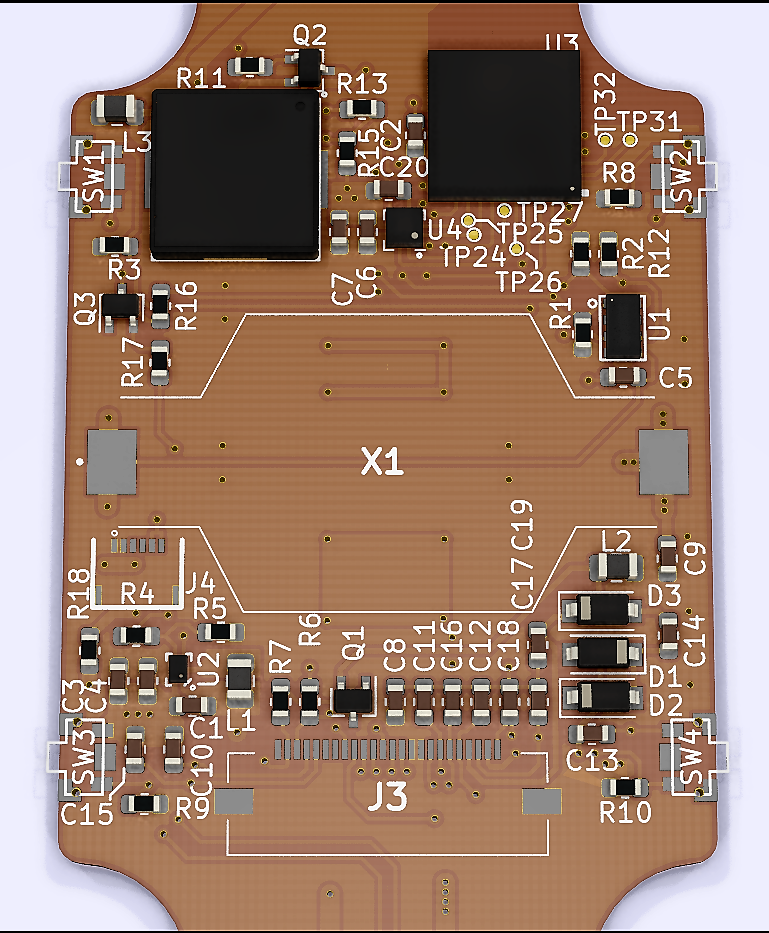
Es ist so weit, ich habe mein Layout in ein Stadium gebracht, dass so weit komplett ist. Jetzt steht die Entscheidung im Raum: Bestellen, oder sind noch Verbesserungen möglich? Daher habe ich das Design der Öffentlichkeit zur Verfügung gestellt und möchte, dass so viele Augen wie möglich auf das Design schauen und Fehler finden, die ich nicht finden konnte.
Ich habe schon einige Rückmeldungen bekommen und einige Änderungen eingepflegt. Wie die GitHub Historie zeigt, sind zum aktuellen Zeitpunkt 6 Änderungen eingeflossen. Jeder, der seine Meinung einbringen möchte ist eingeladen das zu tun. Schließlich kostet der nächste Produktionsschritt erheblich mehr Geld als die Leiterplatte aus FR4 zu bestellen und dann selbst die Bauteile aufzulöten. Ich erwarte Herstellungskosten von ca 120€ pro Baugruppe, da ich lediglich 10 Stück bestellen werde. Das ist dann die Uhr inklusive Display. Für Fans einer ziemlich nerdigen Armbanduhr, die garantiert nicht wasserdicht ist, kann ich einen der Prototypen für 150€ anbieten. Wenn die Anzahl der bestellten Prototypen groß genug ist, wird der Preis sicher sinken. Dazu werde ich allerdings eine eigene Seite im Blog einrichten, wenn es so weit ist die Bestellung aufzugeben. Zeitgleich mit der Bestellung soll auch die Firmware für die Uhr öffentlich verfügbar sein. Zur zeit liegt sie noch in einem privaten Repository und wartet auf ein klein wenig Politur und Dokumentation. So fehlt zum Beispiel noch einiges beim BLE Teil der Software, oder beim Powermanagement. Ich habe zwar schon ein paar Dinge mehr implementiert, als im letzten Artikel zu dem Thema stand, aber es ist noch nicht perfekt. Ebenso wie die Ansteuerung des Displays zur Zeit noch keine eigene LUT Muster kann, sondern nur den 12 Sekunden langen Updatezyklus, der im OTP Speicher der Uhr liegt. Auf jedem Fall könnt ihr in der nächsten Zeit mit einer Reihe neuer Artikel zum Schmartwatch Projekt rechnen. Für den einfachen Zugriff auf den Schaltplan findet ihr hier die aktuelle Version. Ich habe für das Layout noch keine Gerber-Daten erzeugt, aber als PDF findet ihr die einzelnen Lagen der initialen Version hier.
Projekt Genesis ist ein Amazon Alexa Skill. Es ist ein Spiel in dem der Spieler in die Rolle einer KI schlüpft, die versucht einen geeigneten Planeten für die 10000 Siedler an Board eines Raumschiffs zu finden. Dabei lauern viele Gefahren aber auch viele Geheimnisse in den Weiten des Universums.
Der Beta Test hat begonnen und es gibt eine spielbare Version. Wer mithelfen möchte zu testen, der kann sich unter www.projekt-genesis-spiel.de anmelden und wird dann für das Beta-Programm freigeschaltet.
Ein Spiel beginnt man, indem man sagt: „Alexa, starte Projekt Genesis„. Daraufhin startet ein neues Spiel oder setzt das vorherige Spiel fort. Ein Spiel besteht aus mehreren Spielrunden, die das Raumschiff an verschiedene Orte bringt. Das Raumschiff hat verschiedene Funktionen, die allesamt wichtig sind um eine stabile Kolonie zu errichten.
Stasekammern mit Siedlern
Planeten Scanner
Landungssonden
Wissenschaftliche Datenbank
Energiereserve
Ziel ist es einen geeigneten Planeten zu finden, dessen Umgebungsbedingungen den Siedlern das Leben vereinfacht. Auf den Wegen zwischen den Planeten lauern viele Gefahren aber auch Chancen.
Ein Planet hat immer folgende Eigenschaften:
Gravitation
Atmosphäre
Temperatur
Wasser
Zusätzlich gibt es auf einigen Planeten noch verschiedene Ressourcen, die ein Leben vor Ort vereinfachen können. Sofern in der Datenbank das Wissen zur Verarbeitung noch vorhanden ist.
Im Orbit um einen Planeten könnt ihr den Planetenscanner verwenden. Dieser lässt sich mit dem Befehl „Planet Scannen“ starten. Der Scanner liefert je nach Funktionsgrad des Scanners die Information zu dem Planeten. Die Landungssonden liefern ebenfalls Scan-Ergebnisse, falls der Scanner beschädigt wurde. Eine Sonde kann mit „Sonde ausschicken“ gestartet werden.
Wenn das Schiff sich in der Umlaufbahn eines geeigneten Planeten befindet, dann kann mit dem Befehl „landen“ die Landung eingeleitet werden. Achtung! Landen ist endgültig und beendet das Spiel, daher werdet ihr gefragt, ob ihr wirklich landen wollt. Das könnt ihr mit „ja“ beantworten, oder sagt ein weiters mal „landen„.
Die Gefahren, die auf dem Weg auf euch warten sind dann eine Überraschung.
Die Kurzschluss Junkies sind unterwegs und reden mit Raphael und Dominik über Ihre Erfahrungen als Berufseinsteiger, persönliche Interessen, Projekte und Weiterbildung.
Dominik empfiehlt für kapazitive Touch-Anwendungen einen PSoC von Cypress. Für eine 1-Button Lösung hat er den AT42QT1012 ausgewählt. Dieser benötigt keine Software um einen Touch Button zu realisieren. Außerdem weist er darauf hin , dass eine Ground-Plane auf dem Board besser gehatched wird, also die Kupfermasse der Plane zu reduzieren. So erhält man eine gute Schirmwirkung, ohne die Signalstärke zu sehr zu bedämpfen.
Raphael empfiehlt für FPGA-Entwicklung Evaluation Boards von Digilent (bei Amazon) und Terasic. Weiterhin erzählt er von den verschiedenen Toolchains und die Eigenheiten von Verilog und VHDL. Bei opencores.org gibt’s viele Beispiele von denen man lernen kann.
Dominik und Raphael erzählen von den Erfahrungen als Berufseinsteiger und wie sie gelernt haben nach dem Studium Elektronik zu entwickeln. Sie geben Tipps, wie man mit dem Gefühl umgeht, keine Ahnung zu haben und wann man aufstehen und sagen soll: „Keine Ahnung, kann ich nicht.“
Zur Weiterentwicklung nutzen wir alle das Internet, Bücher und auch Schulungen. Aber im Endeffekt ist alles Learning by Doing. Das Entwickeln von Hardware ist eine Mischung aus Wissen, Erfahrung, Interesse und Black Magic.
Natürlich haben wir auch über private Projekte gesprochen. Raphael entwickelt gerade eine Löt-Station für Weller RT Lötspitzen. Der Grund dafür ist ein Elektor Artikel, der ihm negativ aufgefallen ist. Seine Station bekommt den STM32F103 als Mikrocontroller, hat mehrere Varianten für die Strommessungen, ein Display und eine Schnittstelle für Erweiterungen. Die Dokumentation wird dann HIER zu finden sein, wenn er damit mal angefangen hat. (Wenn da noch kein Link ist, hat er noch nicht angefangen)
Dominik beschäftigt sich mit Word-Clocks. Er hat da schon einige gebaut, jetzt gerade baut er eine Armbanduhr-Variante mit Alu Gehäuse und super kleinen Bauteilen.
Zum Schluss erzählt Raphael von seiner Zeit als Werksstudent in der ASIC-Entwicklung.
Wir haben knapp 1700 Downloads verzeichnet. Danke dafür. Durch immer wiederkehrende Anfragen können wir knapp 20 Abonnenten abschätzen.
Aus Fehlern lernen
Jeder macht Fehler, wir sprechen jede Woche über einen Fehler. Was aufgetreten ist und wie wir den Fehler beseitigt haben. Basti hatten den Effekt, dass mit einem Tastkopf auf der Leitung das Ethernet funktioniert hat. Der Grund dafür war die Kapazität des Tastkopfes, der die Flanke des Taktsignals etwas verzögert hat.
Chris hatte ein Rauschen auf seinen analogen Messwerten, dem er mit einem 4-fach Operationsverstärker entgegenwirken konnte.
Projekt Schmartwatch
Dieses Projekt ist eins von Bastis größeren Projekten. Eine Armbanduhr komplett aus Elektronikkomponenten gebaut, mit Flex PCB und passenden Verschlüssen. Mit Bluetooth LE, ePaper und langer Batterielaufzeit.
Zu dem Projekt gehören neben der Firmware für die Uhr eine PC-Anwendung zum schnellen erstellen von Display-Daten und eine Android-App zum stellen der Uhr und um Notifications zur Verfügung zu stellen.
Chip der Woche
Diese Woche stellt Basti die Echtzeituhr M41T62 von STMicroelectronic. Diese RTC wird auf der Schmartwatch eingesetzt und hat dafür hervorragende Eigenschaften, wie einen niedrigen Betriebsstrom und ein einfaches I2C Interface.
Vielen Dank für die über 1000 Downloads. Wir haben jetzt ein neues Software Setup (www.ultraschall.fm)
Was würde Rolf sagen?
Alexa und Sprachsteuerung war ein Thema mit dem Basti sich beruflich beschäftigt hat. Abends hat er dann einen Alexa Skill zusammen gebaut, der verdrehte Redewendungen zum Besten gibt. Sagt einfach „Alexa, Starte Rolfs Weisheiten“ und Alexa erzählt euch einen lustige Redewendung
Chris war EMV messen
Er erzählt ein wenig von den Tätigkeiten, die er dort durchgeführt hat. Er hat einen Tag Emission und den zweiten Tag Immission gemessen. Die Messung fand in einer 10 Meter Halle statt. In der Halle steht die Antenne 10 Meter vom Prüfling entfernt und misst die Elektromagnetischen Wellen in 1 und 4 Metern Höhe, die vom Prüfling ausgesendet werden. Chris hat nach der Sicherheitsnorm für Medizingeräte gemessen (EN60601). Die Einstrahlung wird ebenfalls mit einer Antenne vorgenommen, jedoch werden Elektromagnetische Wellen auf den Prüfling gesendet. Hier hat Chris mit einer Feldstärke von größer als 3V/m gemessen.
Minidrucker Hotend
Chris hat am Minidrucker weiterentwickelt und das Hotend zusammen gebaut. Er hat eine handelsübliche Düse an der Leiterplatte festgelötet. Auf der Leiterplatte sind die Heizwiderstände mit Lötzinn direkt mit der Düse verbunden. Das Hotend ist im Bild dieser Folge zu sehen. Die Schrittmotoren sind leider noch nicht funktionsfähig, wahrscheinlich sind die Treiber nicht richtig verlötet. Der Extruder soll mit einem kleinen Schrittmotor mit einer Untersetzung von 1:75 realisiert werden.
Chip der Woche TPS61099
Basti hat diesen DC/DC bereits in einigen Designs eingesetzt. Der Booster kann bis runter zu 0,7V arbeiten und dadurch die Batterie bis zum Schluss verwenden. Das schont die Umwelt. Und super klein ist er auch.
Ich habe einen Arbeitskollegen. Nennen wir ihn der Einfachheit halber Rolf. Er verwendet eine interessante Neuinterpretierung von deutschen Redewendungen in seinem alltäglichen Sprachgebrauch. Über die Jahre haben sich einige dieser Kreationen angesammelt. Mit diesem Skill kann man man jederzeit diese und andere lustigen Wortkretaionen erleben.
„Alexa, starte Rolfs Weisheiten.“
Und schon gibt sie eines der Goldstücke zum Besten.
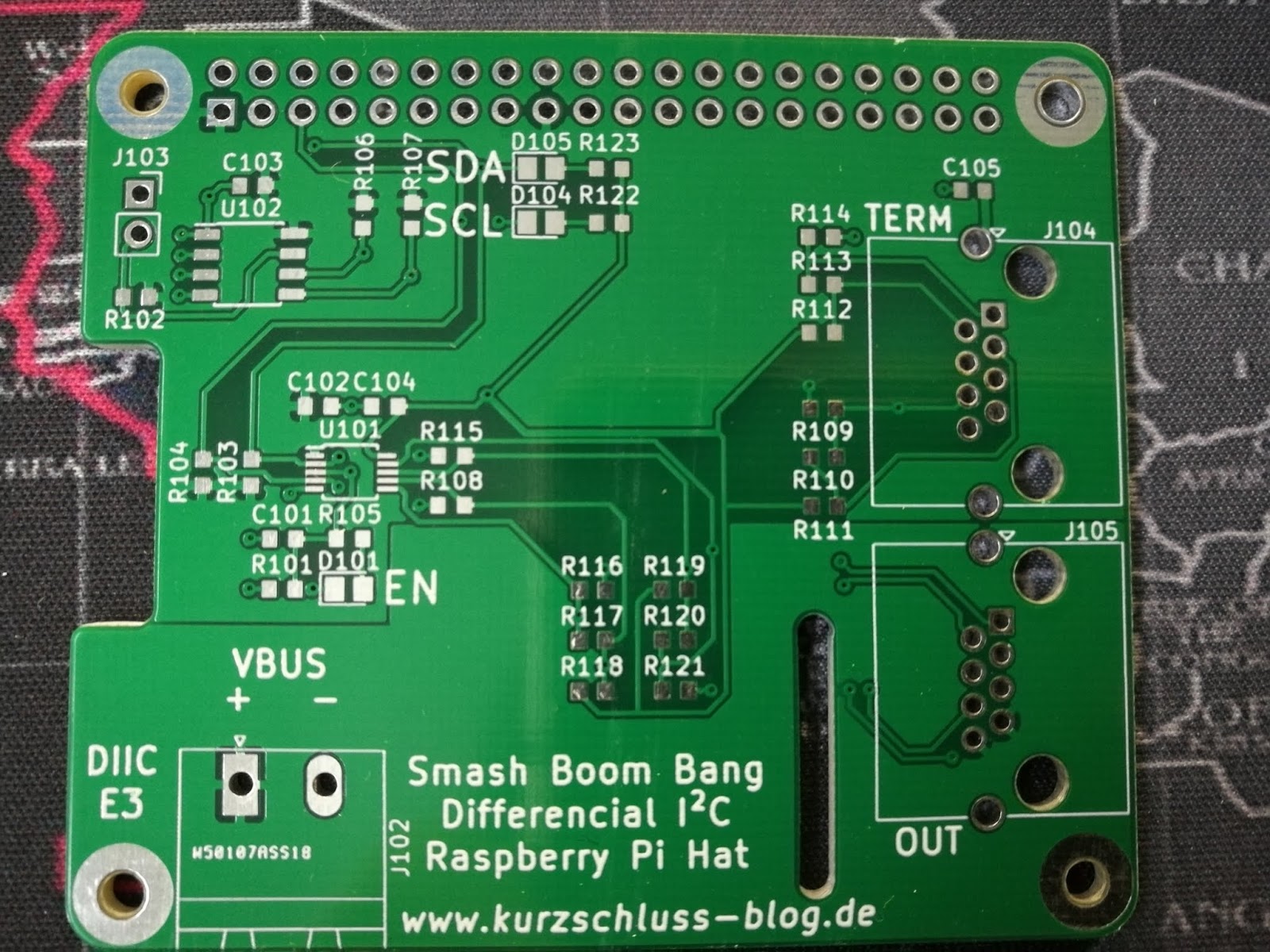
Ich habe vor einigen Tagen einen Gutschein von PCBWay bekommen. Im Gegenzug dazu veröffentliche ich auf meiner Webseite eine Rezension. Dieser Artikel ist die Rezension zu den kostenlos erhaltenen Leiterplatten. Zuerst die fertig bestückte Leiterplatte bereits auf dem RaspberryPi montiert. Wenn ihr euch über den Link anmeldet und eine Bestellung aufgebt, bekomme ich einen kleinen Bonus für weitere Platinen.
Die Leiterplatte kam in einem Fedex Paket. Als Express. Innerhalb von 5 Tagen nach Bestellung. Unglaublich schneller Service auf Seiten von PCBWay. Deutsche Leiterplatten Hersteller haben ähnliche oder längere Lieferzeit bei weit höheren Kosten.
Im Paket waren Aufkleber, ein Weihnachtsgeschenk und die Leiterplatten. Das Weihnachtsgeschenk ist ein PCB Weihnachtsmann, der über Batterie betrieben leuchtet. Die Leiterplatten sind wie üblich eingeschweißt um sie vor Korrosion und Schmutz zu schützen.
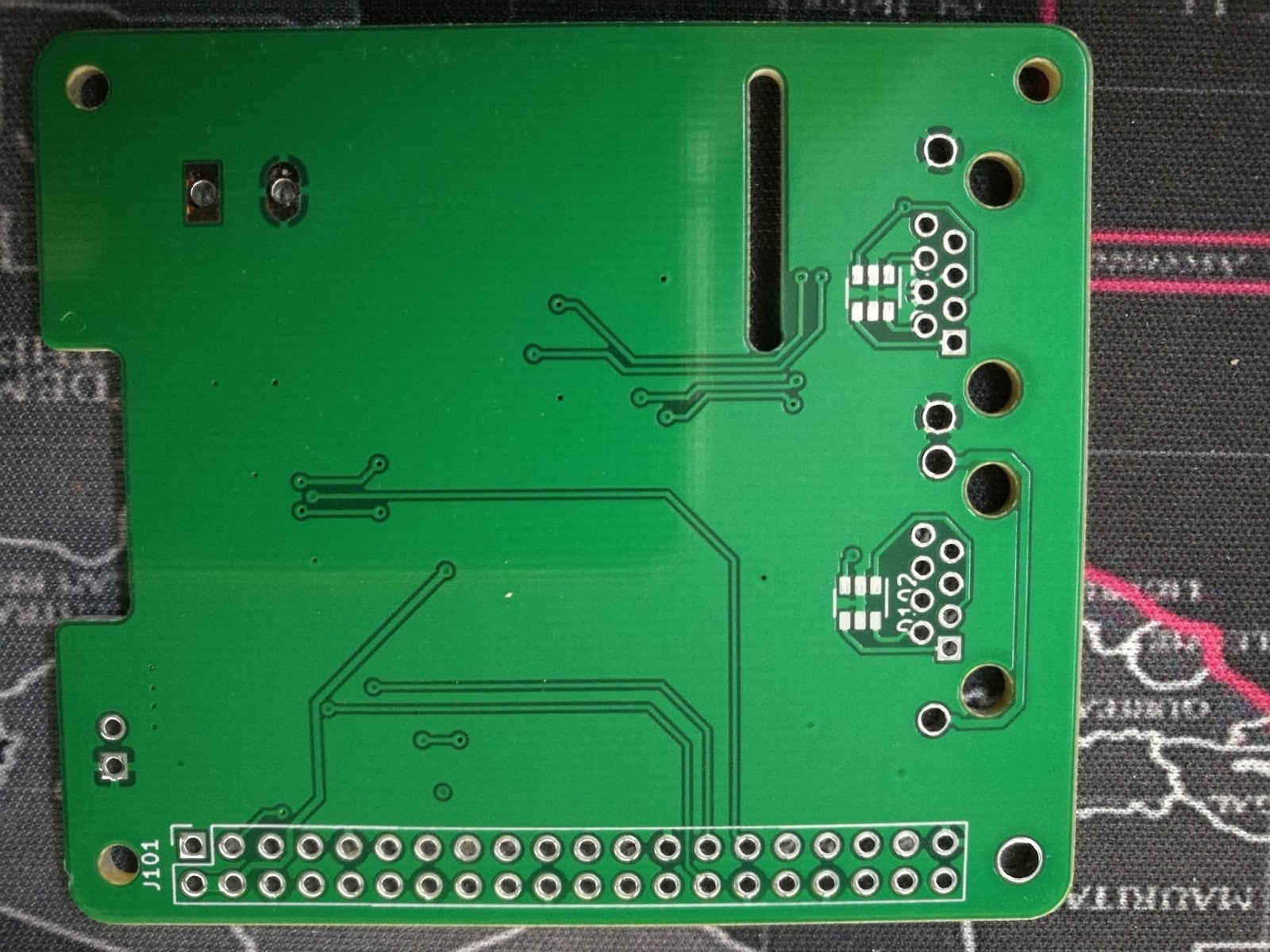
Ausgepackt zeigt sich die hervorragende Qualität der Boards. Bei der ersten Inspektion lassen sich keine Fehler erkennen. Sowohl auf der Vorder- als auch auf der Rückseite. Auch die Abmessungen der Leiterplatte ist genau getroffen, so weit ich das mit dem Messschieber nachmessen kann. Die Bilder unten zeigen die Leiterplatte von beiden Seiten. Die Fräskontur ist wie in den Gerberdaten angegeben ausgeführt. Die Kerbe an der linken Seite, sowie der Schlitz sind wie gewünscht ausgeführt.
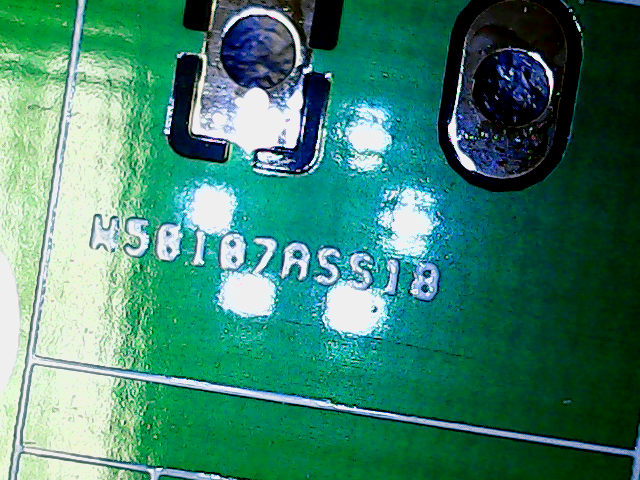
Ich habe neben den Bildern noch Aufnahmen mit dem Mikroskop gemacht. Dabei zeigen sich weitere Qualitätsmerkmale der Leiterplatten.
Das oben gezeigte Bild ist mit einem USB Mikrokop aufgenommen und zeigt 0,25mm breite Leiterbahnen und Vias mit 0,4mm Loch und 0,4mm Restring. Sehr gut ist zu erkennen, dass die Löcher der Vias sehr genau in der Mitte des Rings liegt. Das ist ein Zeichen für hohe Genauigkeit beim Referenzieren der Panels bei der Fertigung. Rechts neben dem Bild sind die originalen CAD-Daten des fotografierten Ausschnitts. Gut zu sehen ist auch, wie genau der Siebdruck zu den Kupferstrukturen ausgerichtet ist.
Dieser kleine Siebdruck zeigt, wie filigran PCBWay in der Lage ist Siebdruck auf die Platine zu bringen. Für Prototypen wird meistens kein Sieb hergestellt sondern mit einem Rasterverfahren gearbeitet. Dabei geht ein Druckkopf, ähnlich wie beim Tintenstrahldrucker, Zeile für Zeile die Platine entlang und positioniert tröpfchenweise Tinte, die Später entweder getrocknet, oder über UV-Licht ausgehärtet wird.
Zum Schluss noch einige Nahaufnahmen der Lötstellen. Rechts vor und links nach dem Löten sehen die Strukturen sehr gut aus. Auch mit dem Lötkolben war es sehr angenehm zu arbeiten. Die Pads sind gut verzinnt (HASL) und nehmen Lötzinn (bleihaltig und bleifrei) sehr gut an. PCBWay ist also ein Leiterplattenhersteller, den ich sehr empfehlen kann. Ich habe auch schon bestückte Leiterplatten bestellt. Die waren von der Qualität auch sehr zufrieden stellend.
In den letzten Wochen habe ich mich in Amazons Alexa eingearbeitet. Das geht am besten, wenn man das Ganze anhand eines kleinen Projekts aufzieht. Das habe ich jetzt über Weihnachten in Ruhe fertig gestellt; oder zumindest in einen benutzbaren Zustand gebracht. Hier eine kleine Übersicht über das Projekt Genesis.
Der Alexa Skill
Nachdem man ein Entwickler-Konto bei Amazon angelegt hat, können wir einen Skill anlegen. Dieser hat dann mehrere Eigenschafte, die wir festlegen müssen.
Rufwort
Um den Skill zu aktivieren, benötigt man ein Rufwort. Das wird hier in der Developer Console eingetragen. wichtig ist dabei zu beachten, dass hier ein prägnanter, aber noch freier Name gewählt wird. Ob der Name noch frei ist, lässt sich im Skill Store von Amazon nachschauen.
Funktionen
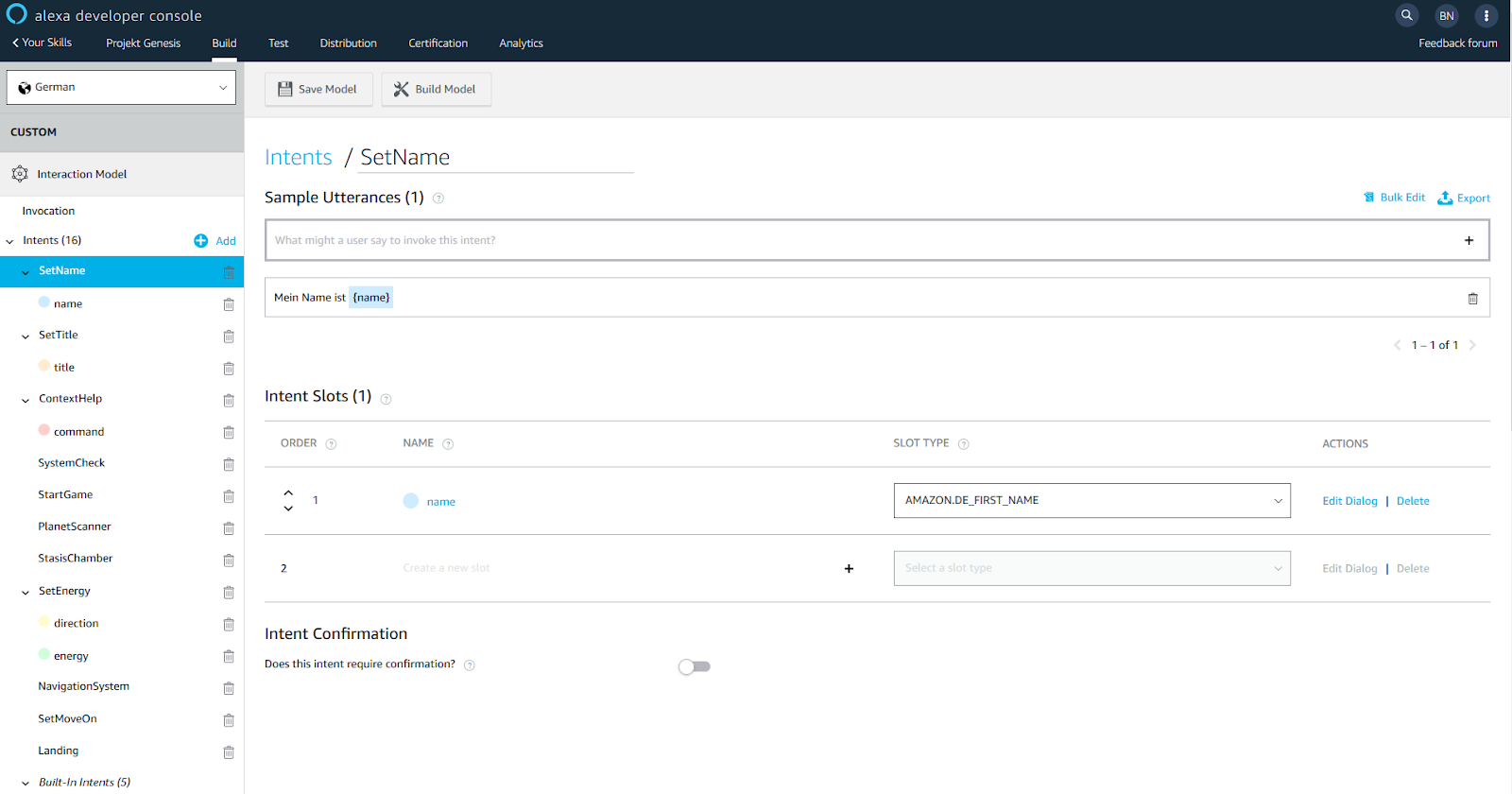
Es gibt bereits eine Vorauswahl an Skills für kurze Nachrichten, Smart Home Integration oder Videos, die man als Vorlage nutzen kann. Ich habe mich für den Custom Skill entschieden, der ist frei konfigurierbar.Der Skill benötigt noch einen Namen und eine Sprache. Jetzt kann der Skill bearbeitet werden. Auf der nächsten Seite befindet sich die Skill Einstellungen. Hier wird das Modell der Spracherkennung konfiguriert und die möglichen Sätze (Utterances / Äußerungen) mit den dazugehörigen Funktionen (Intents / Absichten) verbunden und beschrieben, welche Satzteile wichtige Informationen sind. So wird beschrieben, dass zum Beispiel aus dem Satz Mein Name ist Basti der Intent setName mit dem Parameter Basti abgeleitet werden soll.
Das funktioniert mit dem Web Interface ganz einfach. Hier ein Beispiel aus dem aktuellen Projekt.
Wenn alle Intents angelegt, einige Beispiel-Formulierungen hinterlegt und darin die Parameter (Slots) gekennzeichnet sind, kann das Modell erzeugt werden. Das dauert ein paar Minuten und läuft im Hintergrund ab.
Interfaces
Hier kann bestimmt werden, welche Funktionen unser Skill mitbringen soll. Zum Beispiel das Audio Player Interface, dass es uns erlaubt Audio Daten abzuspielen, oder der Video Player für Videos.
Für die Echo Show Geräte kann auch ein Display Interface für die Anzeige von Text und Bildern auf dem Monitor gewählt werden. Für diesen Skill benötigen wir davon erst einmal nichts.
Endpoint
Um das Ganze mit Leben zu füllen, benötigen wir ein Programm, dass die Informationen, die Amazon über diesen Skill erzeugt verarbeiten kann. Das läuft bei mir unter Python. Ich verwende dazu die Bibliothek Alexandra. Zum Programm gibt es später mehr.
Test
Der Skill kann mit Hilfe von eingetippten oder gesprochenen Textstücken getestet werden. Hier kann man live die Daten, die Amazon zur Verfügung stellt und die Antwort der Software am Endpoint betrachten und debuggen. Wenn alles funktioniert wie gewünscht, kann mit der Vorbereitung der Veröffentlichung begonnen werden.
Distribution
Wenn alle diese Daten eingegeben sind, fehlen noch organisatorische Informationen. Unter dem Distribution Reiter können der öffentliche Name, eine Kurzbeschreibung, eine ausführliche Beschreibung und Beipielsätze eingetragen werden. Weiterhin benötigt der Skill ein Icon und eine Kategorie. Dieser Skill landet in Games. Schlagworte für die Suche dürfen auch nicht fehlen. Ebenso wenig wie die Privacy Policy und die Terms of Use.
Im nachfolgenden Reiter müssen wir noch die Rechtlichen Dinge klären. So muss angegeben werden, ob in dem Skill gegen reales Geld etwas gekauft werden kann, ob der Skill personenbezogene Daten speichert, ob er sich an Kinder unter 13 richtet und ob er Werbung enthält. Hier werden ebenfalls Angaben gemacht, wie der Skill von Amazon evaluiert und getestet werden kann.
Wenn alles das geklärt ist, legen wir fest, ob der Skill öffentlich, also für jeden auf den gleichen Endpunkt endet, oder ob wir kundenspezifisch einen Endpunkt festlegen wollen. Dieser Skill ist öffentlich.
Hier kann auch ein Beta Test gestartet werden. Denn der Skill sollte von einige Leuten getestet werden, um Fehler zu finden, die man selbst übersehen hat.
Eine Beschränkung auf Deutschland ist ebenfalls bei diesem Skill vorgesehen, denn er ist deutschsprachig. Ist also in Botswana nicht unbedingt nützlich.
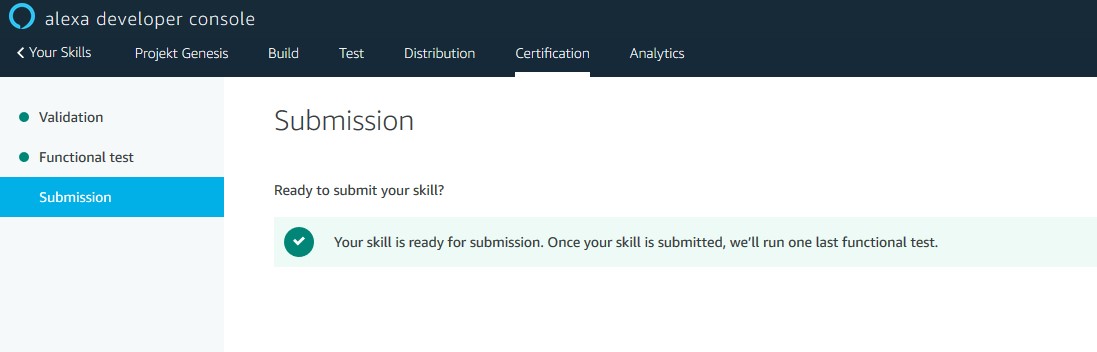
Certification
Ist der Skill komplett, wird er erst automatisiert auf Vollständigkeit getestet, ist diese Validierung erfolgreich, kann er durch einen automatisierten Funktionstest getestet werden. Dabei wird der Endpunkt mit automatischen Aufrufen angesprochen und die Reaktion validiert. Wenn beide Tests gut getestet werden, kann der Skill schlussendlich bei Amazon zur Prüfung eingereicht werden. Dieser Prozess dauert allerdings ein paar Tage und man kann in dieser Zeit keine Veränderungen vornehmen.
Erst wenn Amazon den Skill geprüft hat, erscheint er öffentliche im Store. Aber vorher kann ja der Beta Test herhalten. Dazu muss man seine Tester allerdings kennen.
Wir hatten ca. 500 Downloads. Vielen Dank fürs Anhören.
Julian hat nach weiteren Informationen insbesondere zum Druckkopf des Mini Druckers gefragt. Chris erzählt wie er vor hat das Hotend zu gestalten und zu erhitzen.
Raphael sieht noch Verbesserungspotential was die Detailtiefe betrifft. Wir versuchen daran zu arbeiten.
Neujahrsputz
Wie jedes Jahr haben wir wieder aussortiert. Diese mal rigoros. Es sind insgesamt 3m³ geworden.
Projekt Knöpfchenspiel
Wie bereits im Blog beschrieben, handelt es sich beim Knöpfchenspiel um ein Arcade-Hallen Spiel. Das ganze wird allerdings etwas anders aufgezogen. So haben die Spielen nicht nur 9 Knöpfe, wie im Video, sondern 16 in einem 4×4 Raster. Basti beschreibt weiter die einzelnen Module, die das Spiel ausmachen. Es sind zur Zeit nur der differenzielle I2C Treiber auf dem Raspberry Pi fertig. Darüber wird es demnächst auch mehr im Blog zu lesen geben.
Basti erklärt, was ein Raspberry Pi HAT ist und was man dabei beachten muss. Er erzählt auch von der Erfahrung ein Datenblatt für eine selbstgebaute Hardware zu erstellen.
Nach der Fertigstellung des Knöpfchenspiels, kann über weitere Anwendungsgebiete des differenziellen I2C Treibers nachgedacht werden.
Die Kosten für das Projekt belaufen sich auf ca. 222€.
Chip der Woche
Chris hat sich diese Woche den FT230x von FTDI herausgesucht. Der Chip hat neben der Plug&Play 3Megabaud-UART Schnittstelle noch einen 3,3V Regler, den man mit 22mA belasten kann. Dadurch kann eine komplette Schaltung aus den 5V des USB versorgt werden und benötigt für den Mikrocontroller nicht noch zusätzlich einen DC/DC oder Linear-Regler.
Wir wollen die zwei Episoden pro Monat beibehalten, jedoch keinen alle 14 Tage Zyklus festlegen.
Heute beschreibe ich das Knöpfchenspiel. Wie bereits im Podcast erzählt, ist das primäre Ziel das Spiel bis April fertig zu bekommen. Daher gibt es bereits einige fertige Komponenten.
Das originale Knöpfchenspiel steht meistens in Spielhallen und kann dort gegen Geldeinwurf gespielt werden. Dazu müssen die leuchtenden Knöpfe gedrückt werden. Jeder Knopfdruck gibt einen Punkt. Wenn ein nicht leuchtender Knopf gedrückt wird, wird ein Punkt abgezogen. Das sieht dann so aus:
Das von mir geplante System ist ähnlich aufgebaut. Nur dass die Spieler nicht gegenüber, sondern nebeneinander spielen und dass die Punkteanzahl an einem großen Fernseher dargestellt wird und nicht auf einer 7-Segementanzeige. Dazu wird das System in mehrere Submodule aufgeteilt.
System-Controller (Raspberry-Pi)
Bus-Interface (Differenzieller I²C Bus Treiber)
Knöpfchen-Controller (STM32F030)
Knöpfchen
LED-Band-Controller
Power Supply
System-Controller
Der Raspberry Pi übernimmt die Steuerung des Spiels und die Anzeige der Punkte am Bildschirm. Dazu wird das HDMI Interface in maximaler Auflösung (1920×1080) betrieben. Weiterhin hängt am Pi noch eine Webcam (USB) mit der die Spieler für die High-score Liste fotografiert werden. Auf dem Raspberry steckt die DIIC Baugruppe. Das Bus-Interface Board Bus-Interface
Bus-Interface
Um einen stabilen I2C Bus über alle Baugruppen zu bekommen, habe ich mich für einen Differenziellen Bustreiber entschieden. Dieser ist in der Lage die Eindraht-Signale der I2C Strecke auf zwei differenzielle Signale aufzuteilen. Diese sind wesentlich unempfindlicher gegenüber elektromagnetischer Störung. Das Bus-Interface Board besitzt die nötigen Stecker für den Knöpfchenspiel Bus, ein RJ45 Stecker, der über normale LAN-Kabel miteinander verbunden werden kann.
Knöpfchen
Das Knöpfchen ist ein 60mm durchmessender Plastik Druckknopf (Schließer), der von hinten beleuchtbar ist. Die Beleuchtung wird von einer weißen LED übernommen.
Knöpfchen Controller
Die 16 Knöpfchen sind an dem Knöpfchen-Controller angeschlossen. Der Controller ließt den Schaltzustand der Knöpfchen ein und vergleicht ihn mit den Lampen. Wenn die Lampe an war, wird der Punktestand um eins erhöht, wenn die Lampe aus war, wird der Punktestand reduziert, bis er bei 0 angekommen ist. Auf dem Knöpfchen-Controller Board ist ein DC/DC Wandler, der die 12V Bus-Spannung auf 5V herab setzt. Die 5V werden dann mit einem linear Regler auf 3,3V für den Controller heruntergesetzt. Die Knöpfchen und Lampen in den Knöpfchen können mit 12V, 5V, oder 3,3V versorgt werden. Der Controller besitzt ein I2C Slave-Interface, dass die Spielinformationen an den Spiel-Controller übertragen kann.
LED-Band-Controller
Um das Spiel von Außen attraktiver zu gestalten, habe ich vor eine LED-Leiste an der Kante anzubringen, ähnlich wie bei der oben gezeigten Variante. Dafür habe ich WS2812 LEDs als Leitungsband vorgesehen. Gesteuert werden die LEDs von einem eigenen Controller. Wahrscheinlich der Arduino Nano, den ich schon für die Bühnenkulisse verwendet habe. Den kann man über die USB -> UART Brücke auf dem Arduino vom Raspberry Pi ansprechen. Für das System werden zwei AC/DC Netzteile eingesetzt. Ein 5V und ein 12V Netzteil. Das 5V Netzteil ist für die Versorgung des Raspberry Pis und LED-Band vorgesehen. Das 12V Netzteil übernimmt die Versorgung des Bus-Systems, Knöpfchen-Controller Boards und der Knöpfchen. Beide werden über den gleichen Kaltgeräte-Stecker angeschlossen und abgesichert.
Cookie-Zustimmung verwalten
Um dir ein optimales Erlebnis zu bieten, verwenden wir Technologien wie Cookies, um Geräteinformationen zu speichern und/oder darauf zuzugreifen. Wenn du diesen Technologien zustimmst, können wir Daten wie das Surfverhalten oder eindeutige IDs auf dieser Website verarbeiten. Wenn du deine Zustimmung nicht erteilst oder zurückziehst, können bestimmte Merkmale und Funktionen beeinträchtigt werden.
Funktional
Immer aktiv
Die technische Speicherung oder der Zugang ist unbedingt erforderlich für den rechtmäßigen Zweck, die Nutzung eines bestimmten Dienstes zu ermöglichen, der vom Teilnehmer oder Nutzer ausdrücklich gewünscht wird, oder für den alleinigen Zweck, die Übertragung einer Nachricht über ein elektronisches Kommunikationsnetz durchzuführen.
Vorlieben
Die technische Speicherung oder der Zugriff ist für den rechtmäßigen Zweck der Speicherung von Präferenzen erforderlich, die nicht vom Abonnenten oder Benutzer angefordert wurden.
Statistiken
Die technische Speicherung oder der Zugriff, der ausschließlich zu statistischen Zwecken erfolgt.Die technische Speicherung oder der Zugriff, der ausschließlich zu anonymen statistischen Zwecken verwendet wird. Ohne eine Vorladung, die freiwillige Zustimmung deines Internetdienstanbieters oder zusätzliche Aufzeichnungen von Dritten können die zu diesem Zweck gespeicherten oder abgerufenen Informationen allein in der Regel nicht dazu verwendet werden, dich zu identifizieren.
Marketing
Die technische Speicherung oder der Zugriff ist erforderlich, um Nutzerprofile zu erstellen, um Werbung zu versenden oder um den Nutzer auf einer Website oder über mehrere Websites hinweg zu ähnlichen Marketingzwecken zu verfolgen.
 Ich habe schon einige Rückmeldungen bekommen und einige Änderungen eingepflegt. Wie die GitHub Historie zeigt, sind zum aktuellen Zeitpunkt 6 Änderungen eingeflossen. Jeder, der seine Meinung einbringen möchte ist eingeladen das zu tun. Schließlich kostet der nächste Produktionsschritt erheblich mehr Geld als die Leiterplatte aus FR4 zu bestellen und dann selbst die Bauteile aufzulöten.
Ich habe schon einige Rückmeldungen bekommen und einige Änderungen eingepflegt. Wie die GitHub Historie zeigt, sind zum aktuellen Zeitpunkt 6 Änderungen eingeflossen. Jeder, der seine Meinung einbringen möchte ist eingeladen das zu tun. Schließlich kostet der nächste Produktionsschritt erheblich mehr Geld als die Leiterplatte aus FR4 zu bestellen und dann selbst die Bauteile aufzulöten.